楚沐猴作品8号-龙骑士

这是一个耗费了很长的工期的作品,以至于好几个月都没有发布新的作品。当然,中间虽然穿插了一些别的小作品,不过,在繁忙的工作之外,主要的精力都投入到这个作品里了
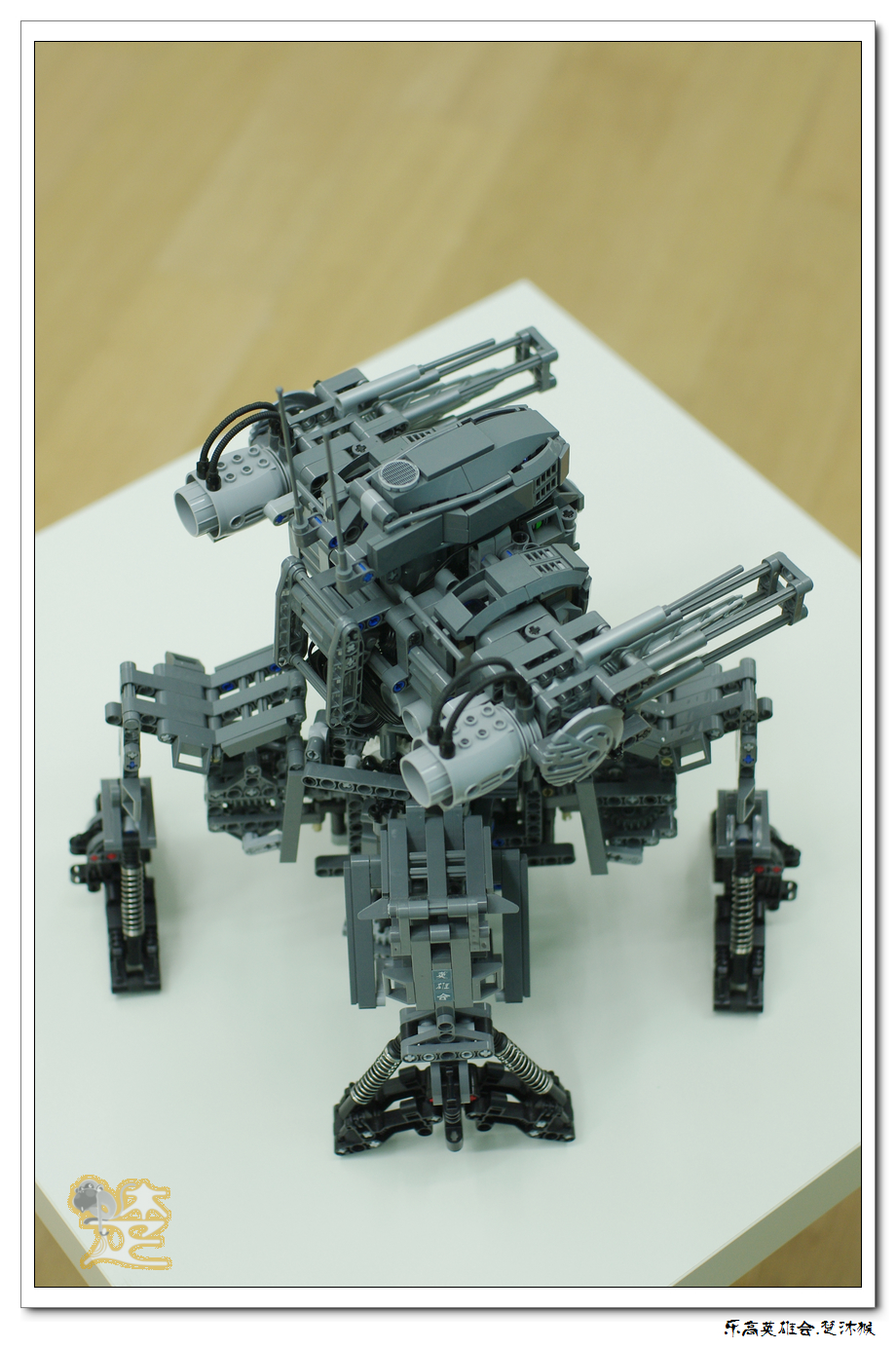
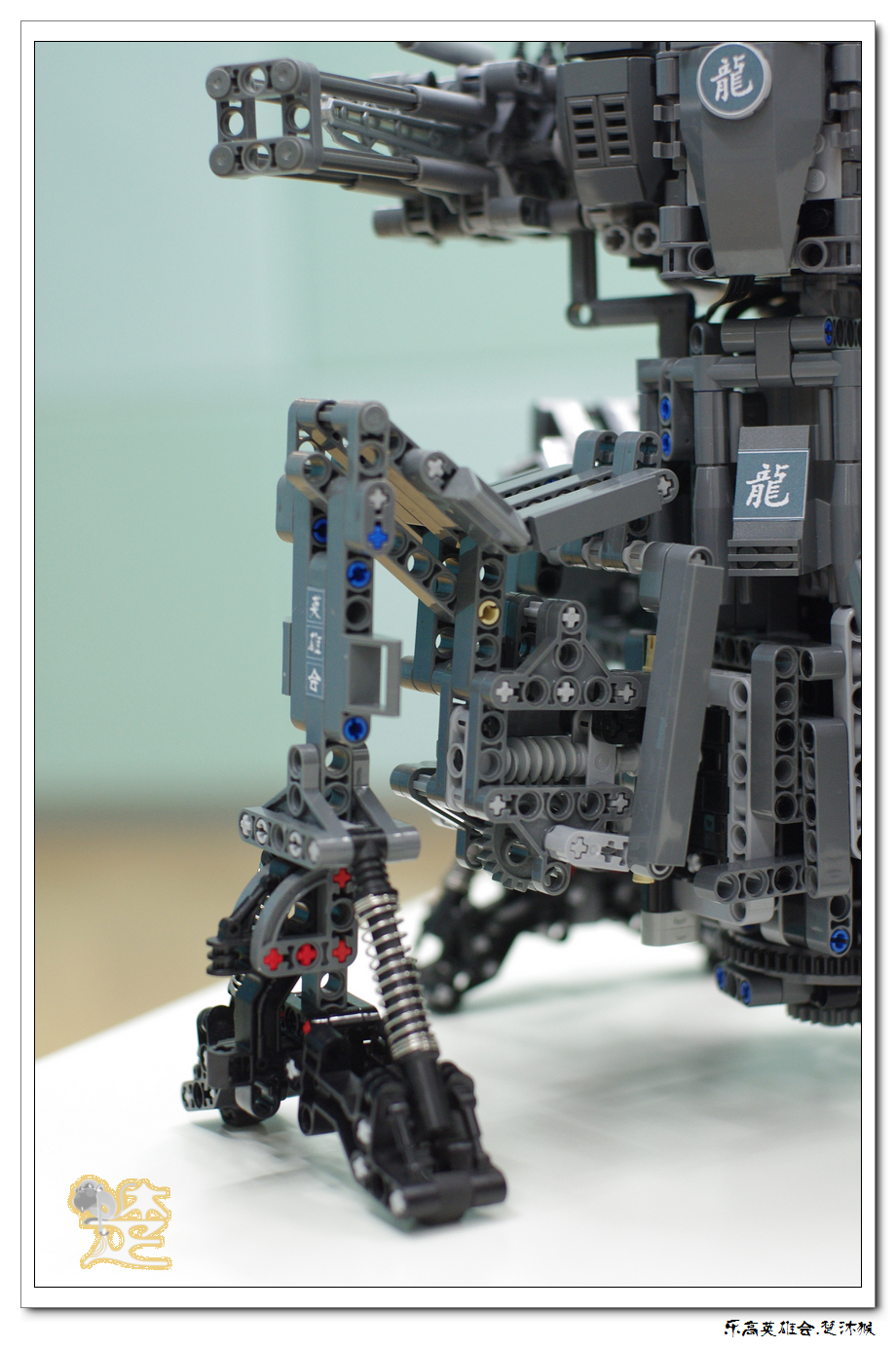
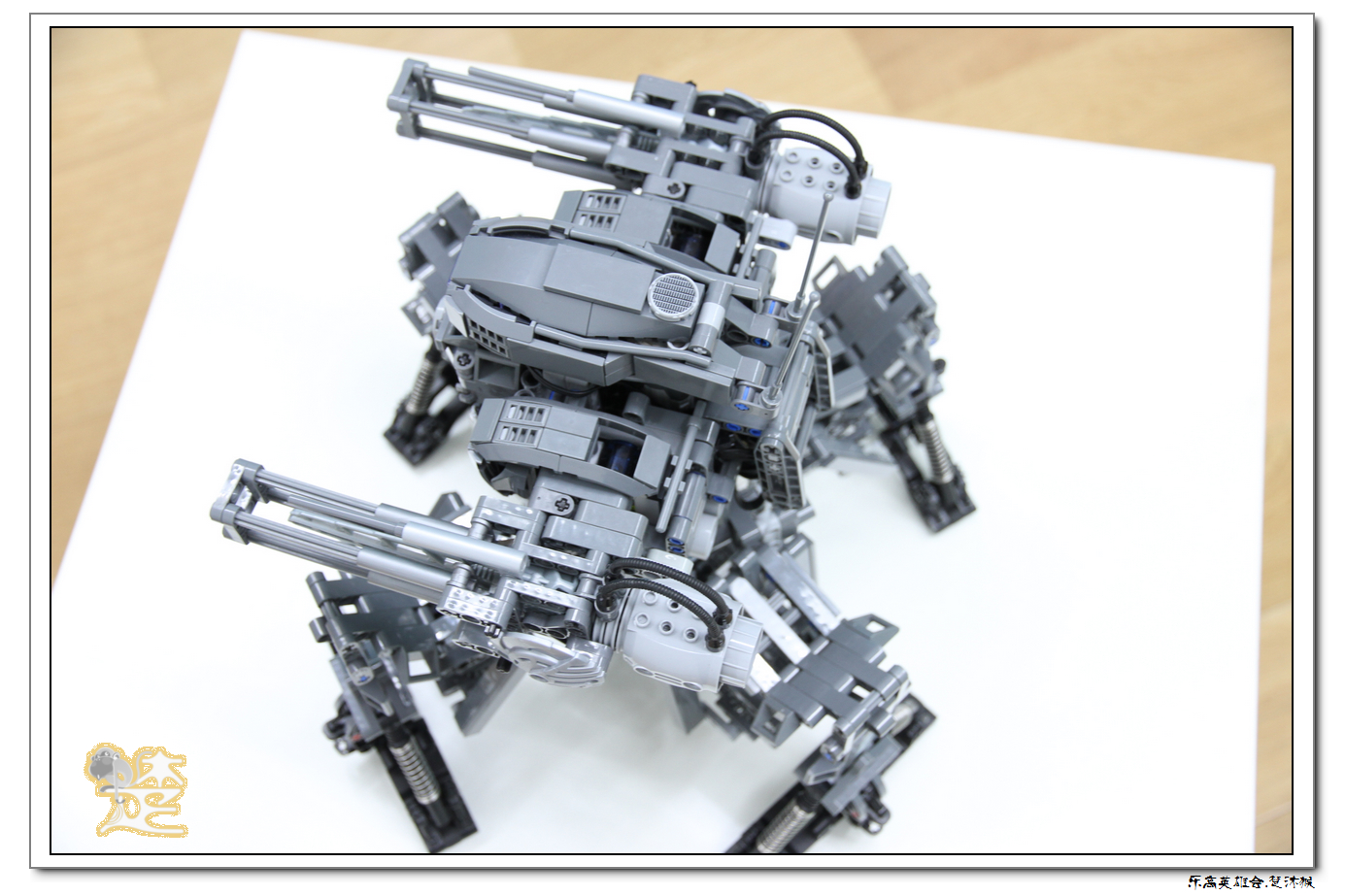
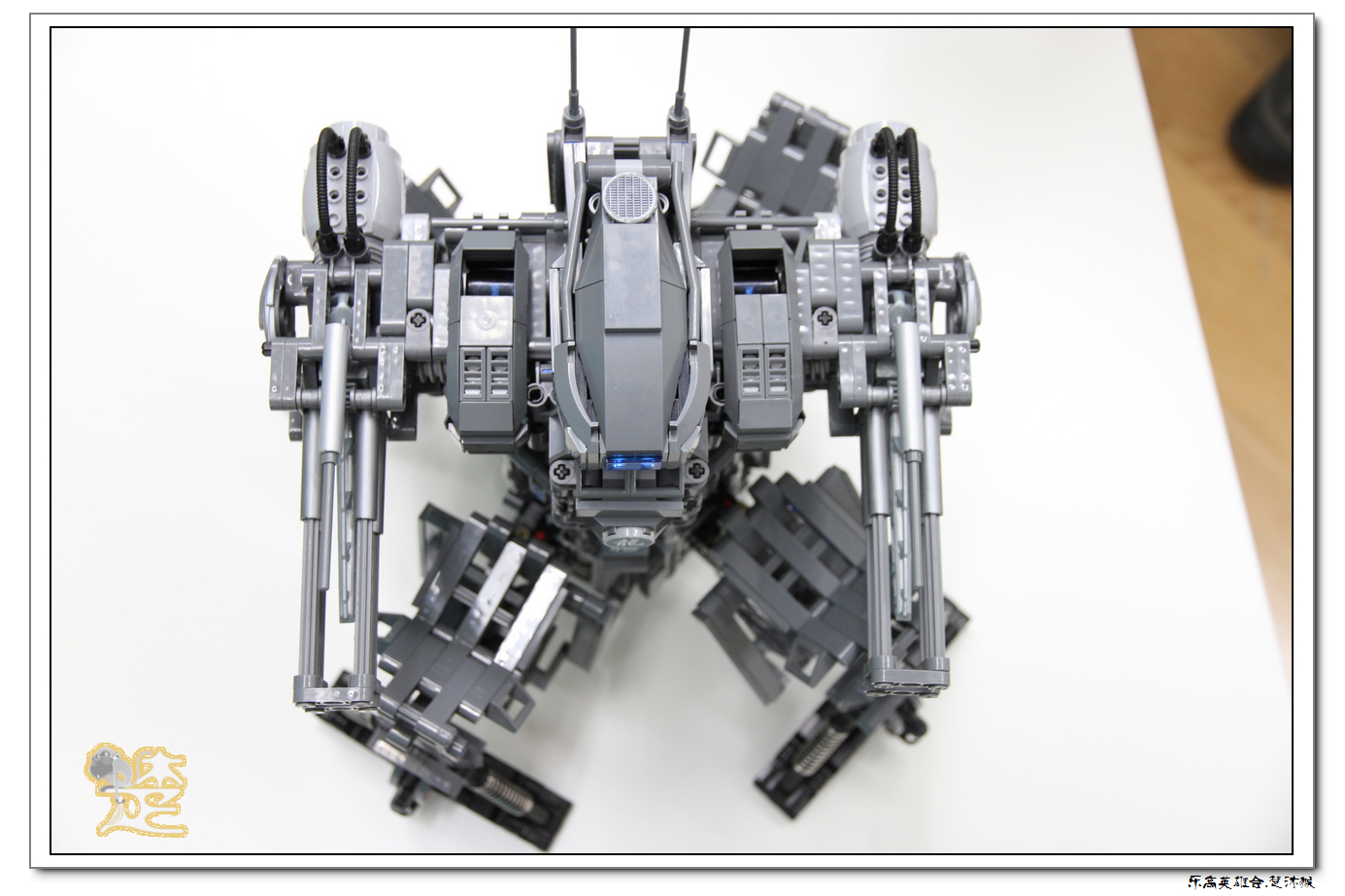
最早是为了这种步行模式想做一个八足的步行机,后来因为体积可能巨大而改成4足的,为了实现性能而不断琢磨减小行动部分的体积,但是最终的体积和重量还是很可观。
步行的方式是这样的:垂直放置的XL电机分别驱动2组4齿传动机构到4条腿上水平放置的蜗杆。每个蜗杆驱动2个24齿齿轮实现4杆运动的转换步行功能。垂直放置的24齿负责牵引腿部的抬起和方向,水平放置的24齿实现在腿抬起的同时牵引腿部在水平方向往复运动。2组X形交叉的腿利用相位的不同交替进行撑起身体重量和前移腿位置的功能。同时,这两组腿还可以在一组腿抬起的时候改变X形的角度,这样可以实现转向功能(交替支撑腿后反向运动X形的角度)
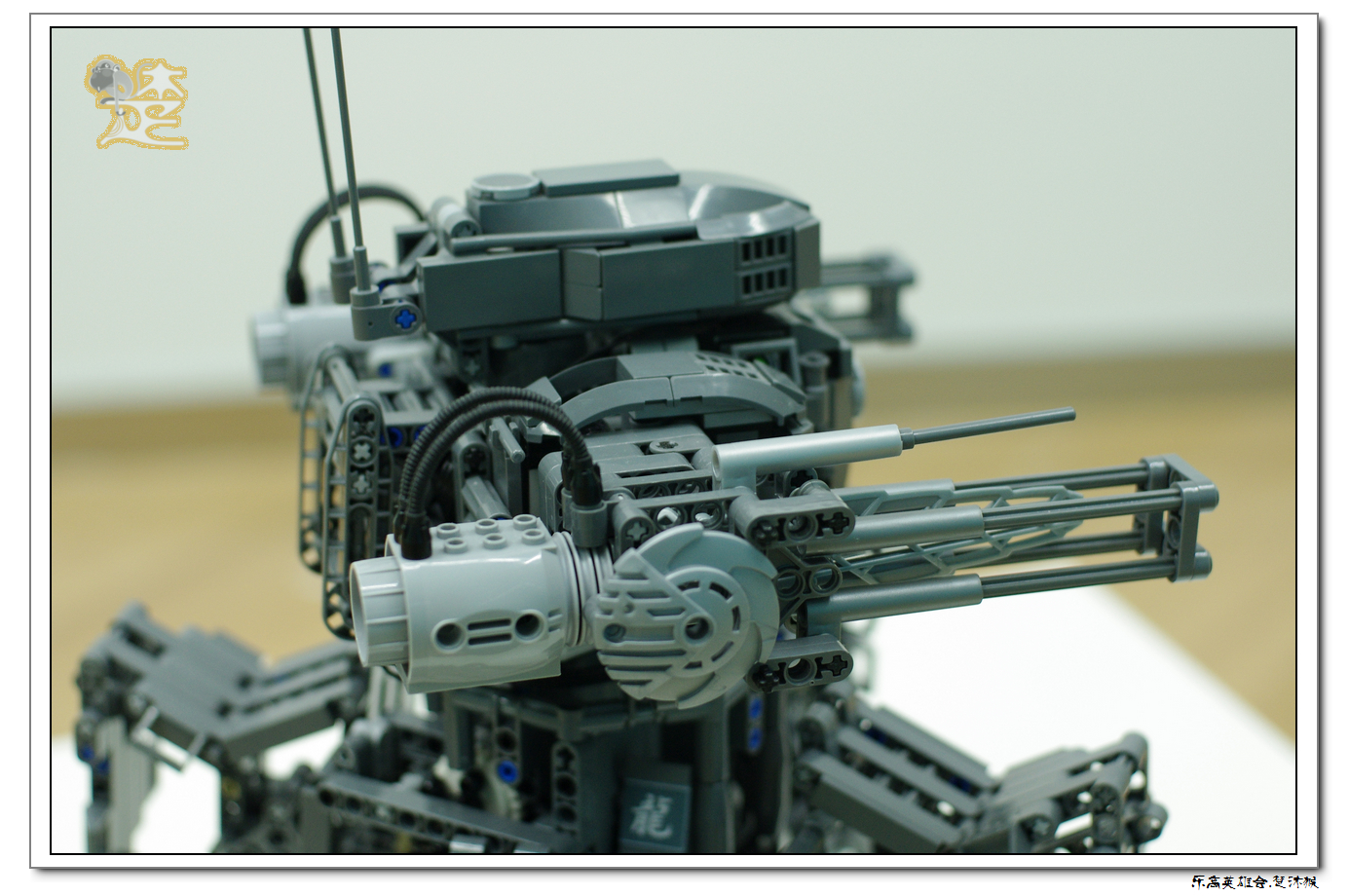
在做好底盘之后,我开始设计龙骑士的上半身。我手上有特殊的乐高激光剑零件,内置电池,按一下上面的按钮就可以连续闪烁十几秒钟,效果很华丽。为此而特意设计了一个击发按钮的机构,开始的时候想用杠杆式的按压,但是这种机构很不靠谱。后来改成现在的方式,利用蜗杆在被齿轮限位的时候被迫在蜗杆所在的轴上滑动的特性去挤压按钮,顺利地实现了功能。
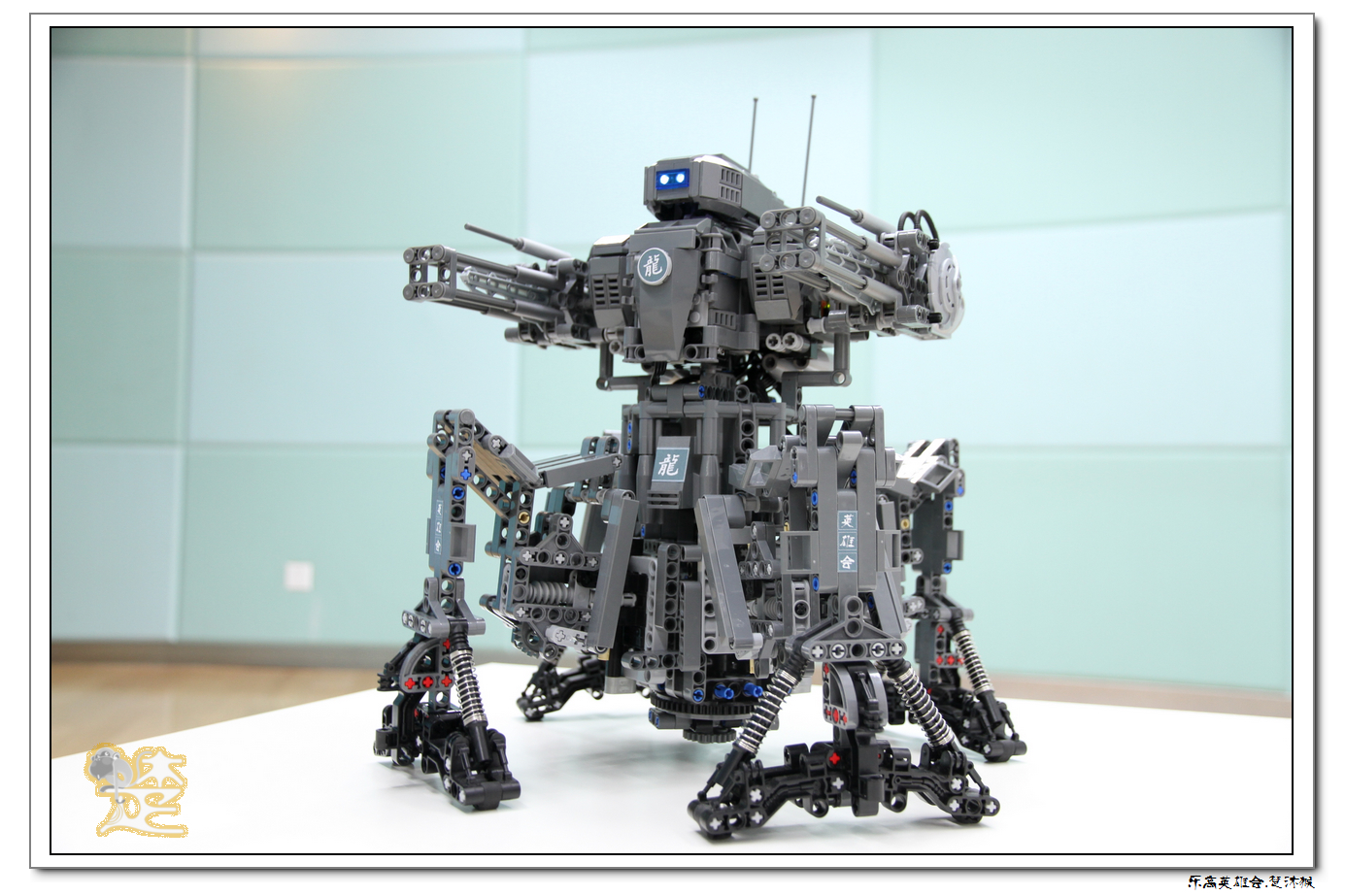
后来就是一直在做装饰,并且做的很开心,感觉帅帅的样子出来了。不过因为零件的限制,上半身做成了深灰色,本来自己实在不想拆,但是为了整个作品颜色协调,还是痛苦地把底盘的黑色全部更换成深灰色,然后作品好看多了
后来带到苏州去演示,现场还是发生了一些意外。首先是我在胸部内置了老款的9V电池盒,但是平时测试的时候用的外置电源,没有料到9V电池盒的功率极小,根本无法正常驱动XL电机,结果根本走不动。然后只好临时外接电源来演示行动。但是因为各个齿轮组的相位没有完全调整好,所以在现场的行动部分虽然运转正常,但是几乎没有向前走动。由于时间仓促,也没有来得及重新调整好拍摄视频,只好请各位根据我的描述自行想象了:D
1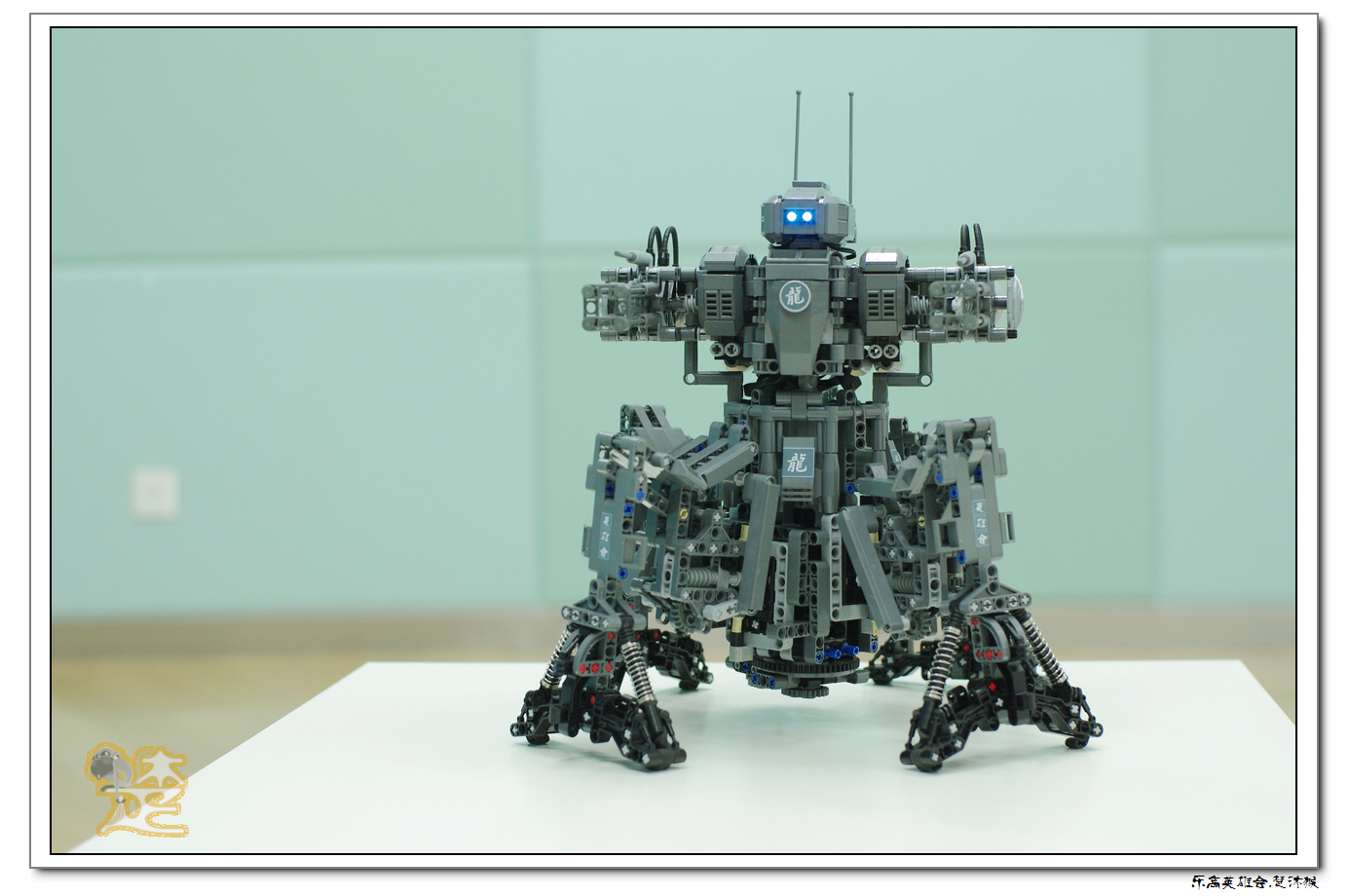
2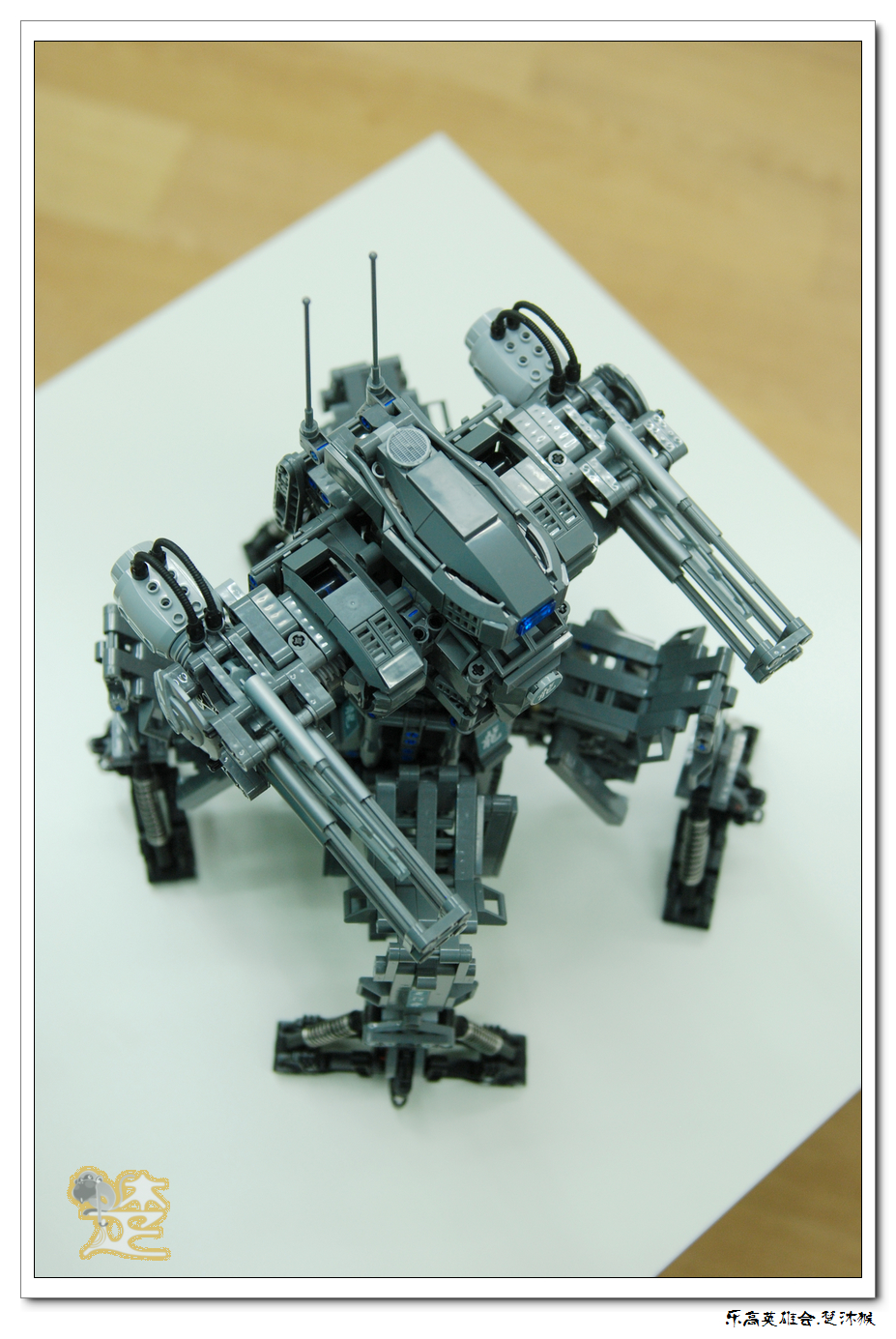
3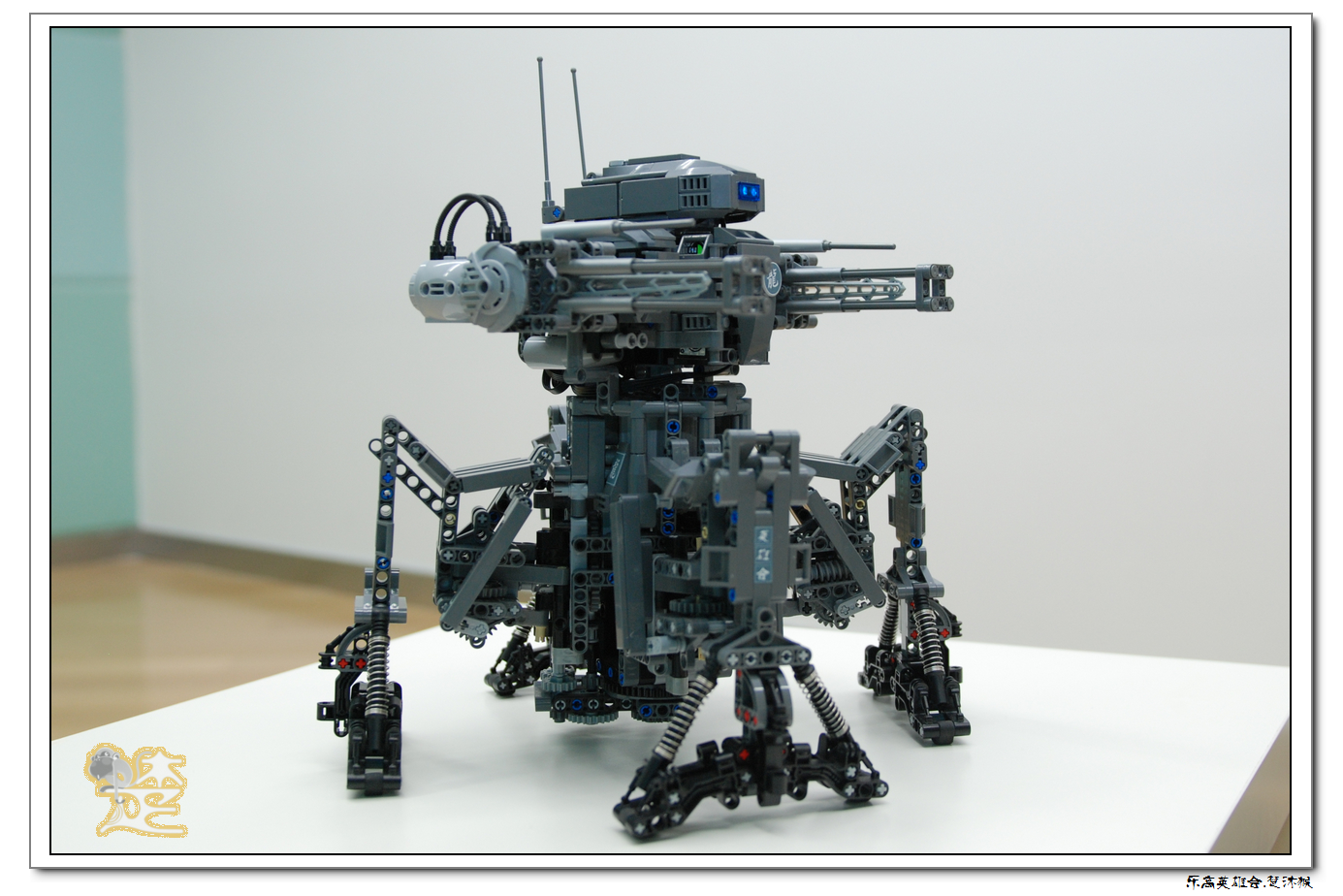
4
5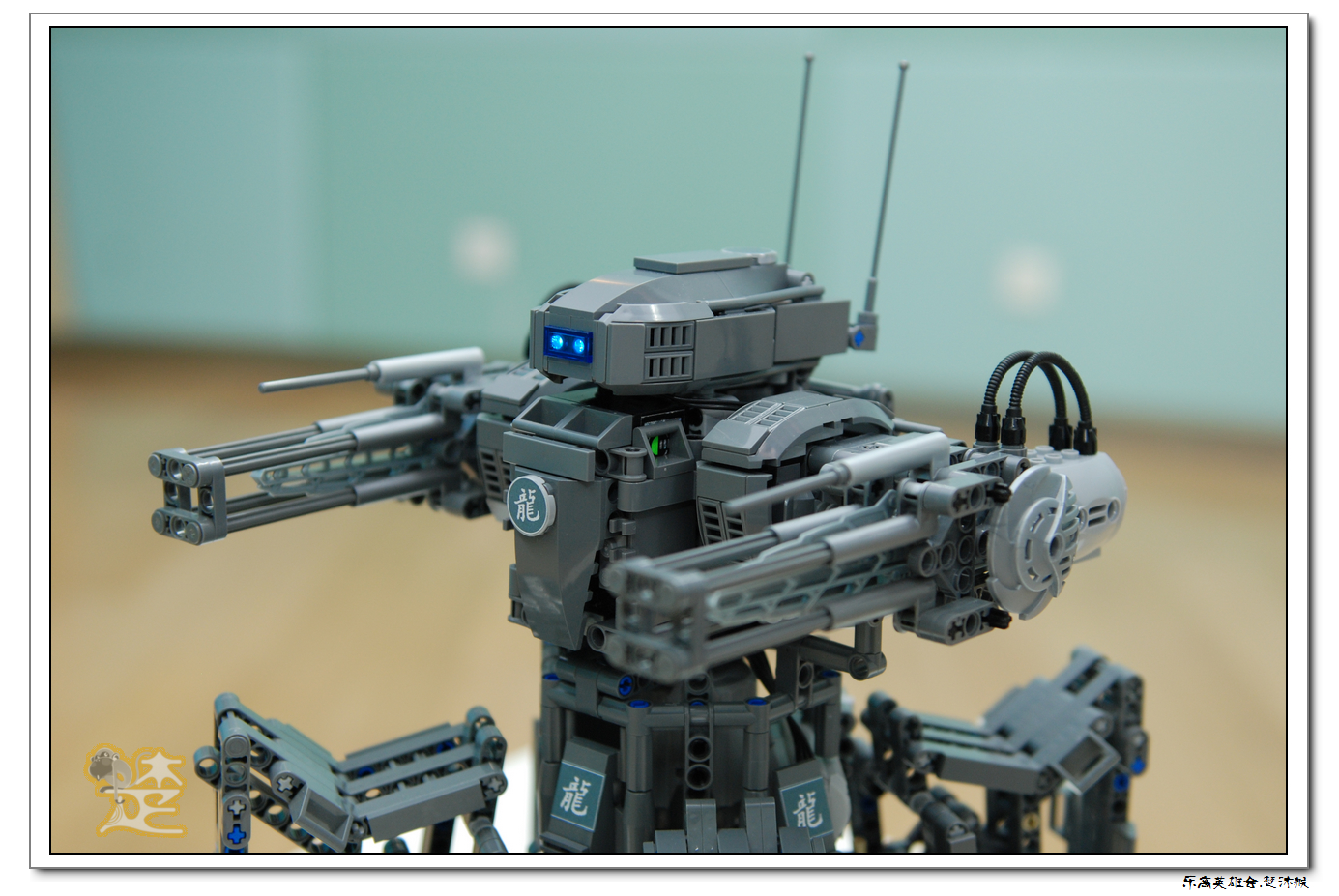
6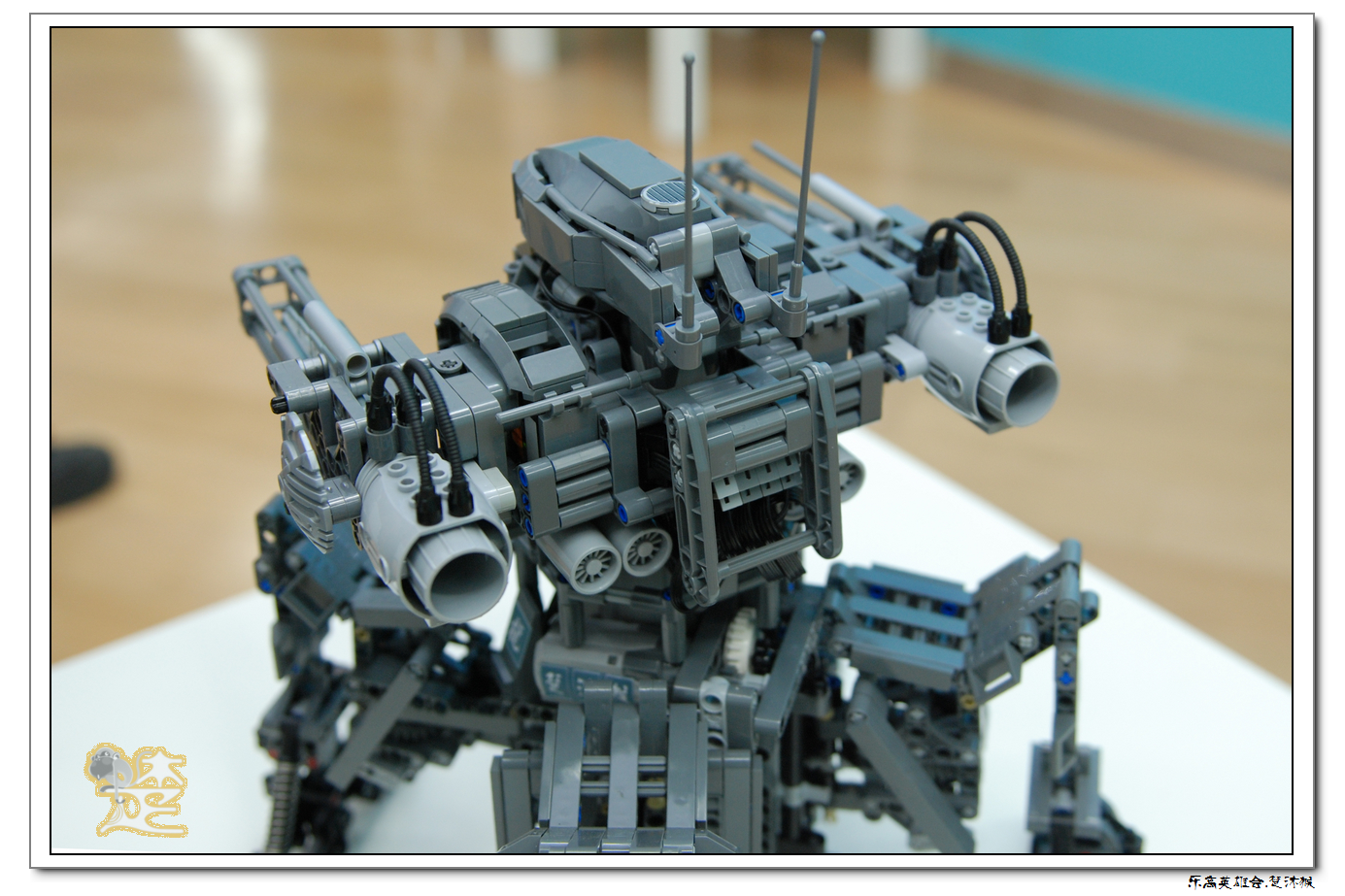
7

8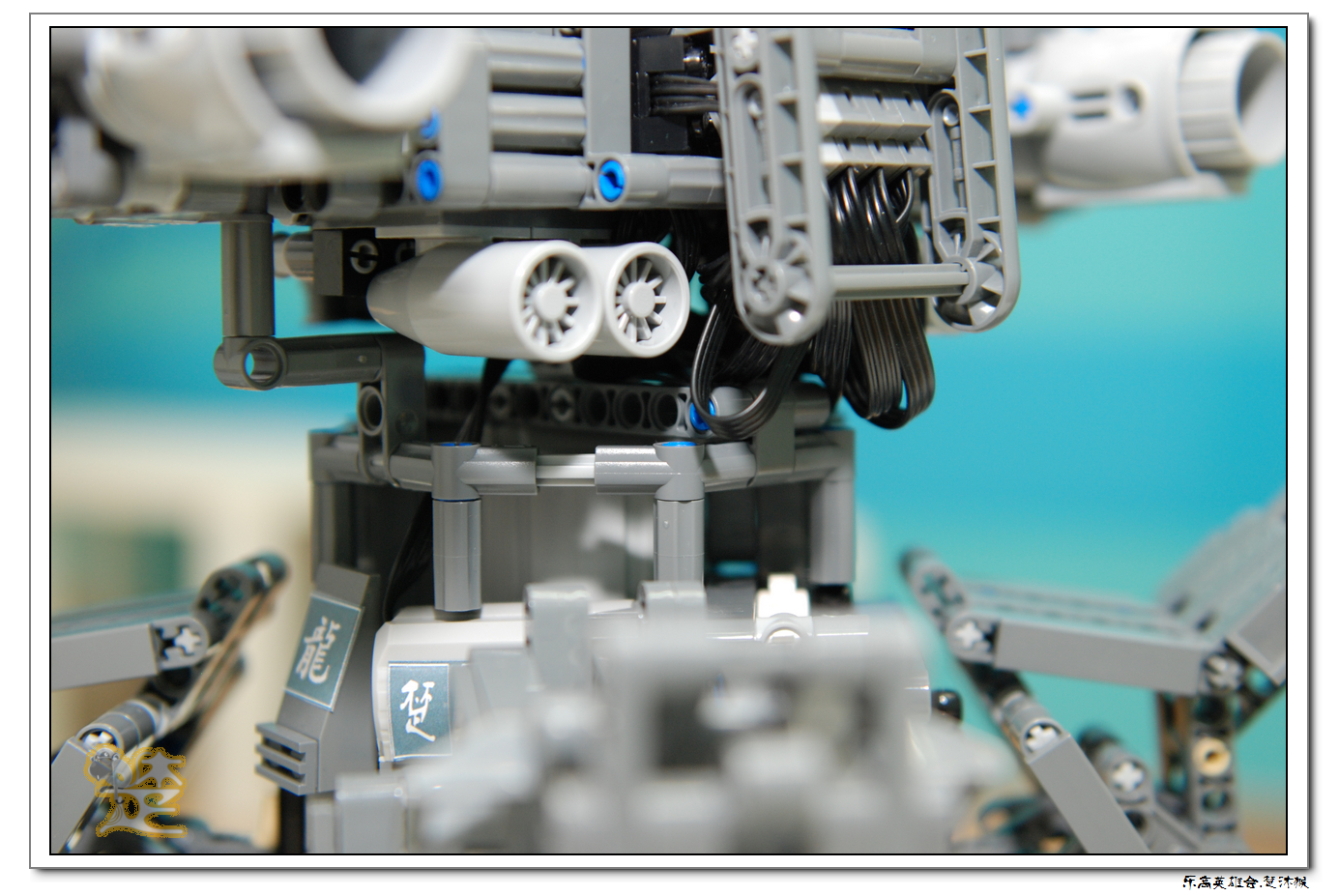
9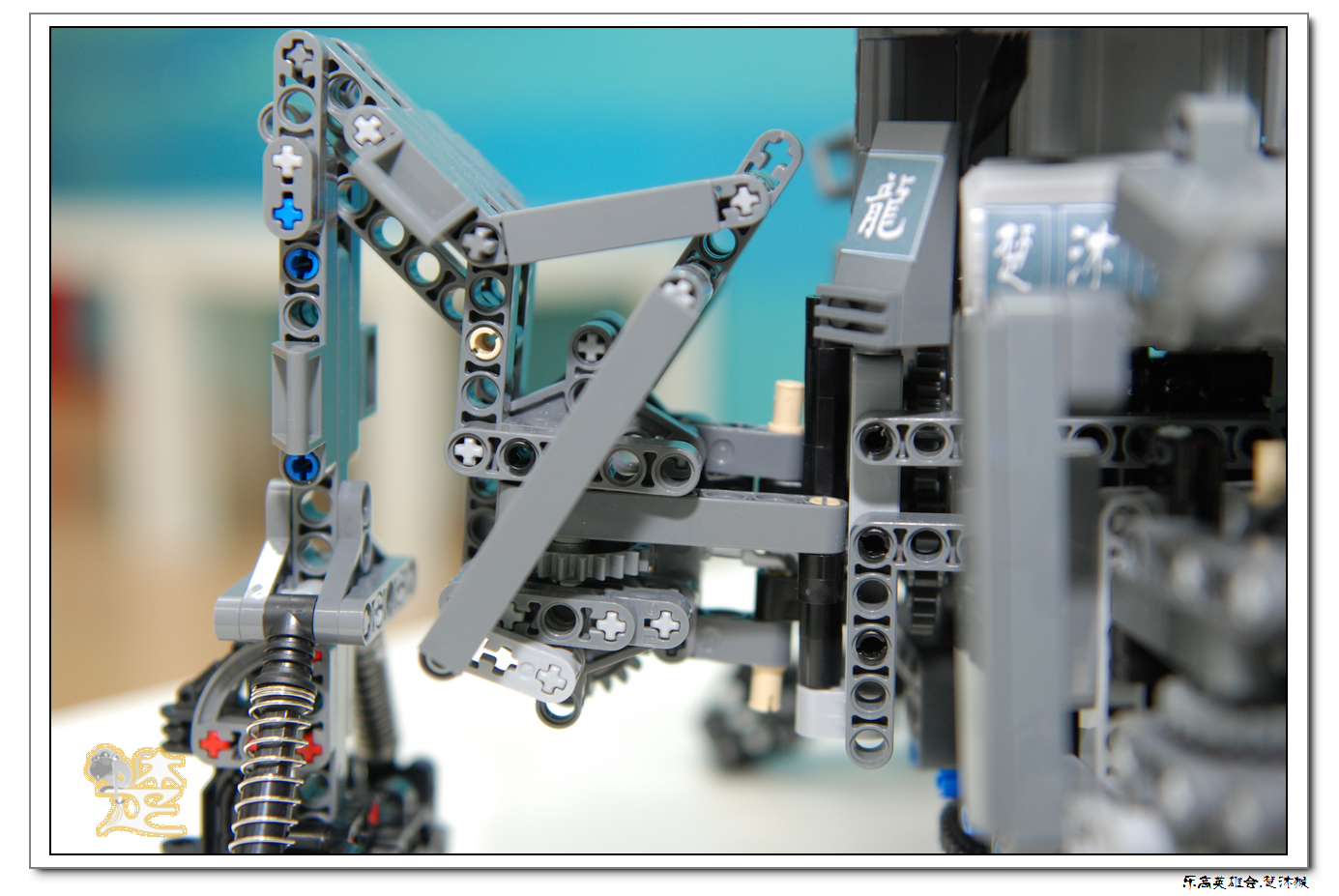
1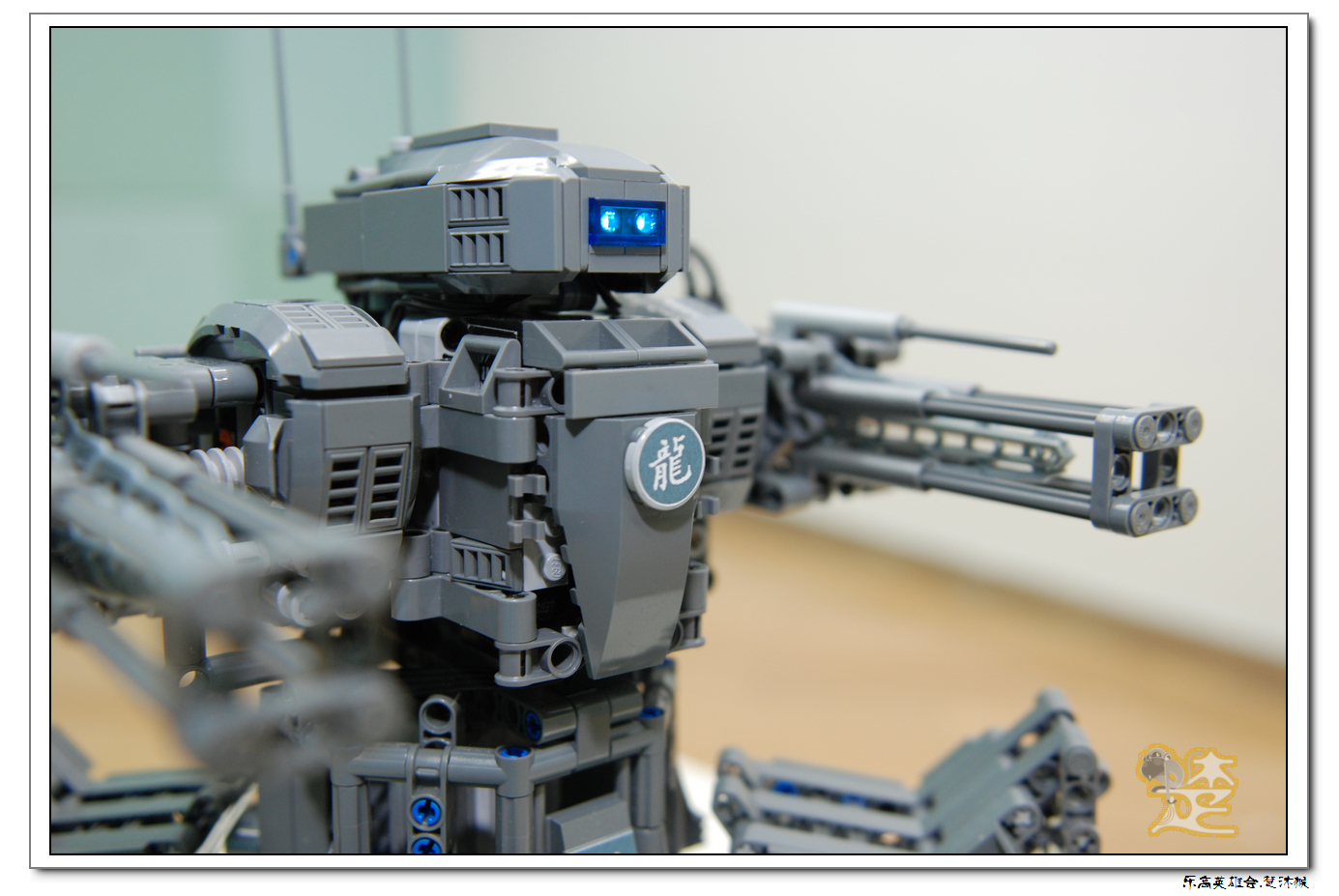
2 4 5 7 |