步行机器人
大家都在做机甲 好漂亮 可惜我不会呀。 :( 哭
我只会做丑陋的机器人。
研究了一下连杆的步行机构有很多原理哦:高级的不得了:
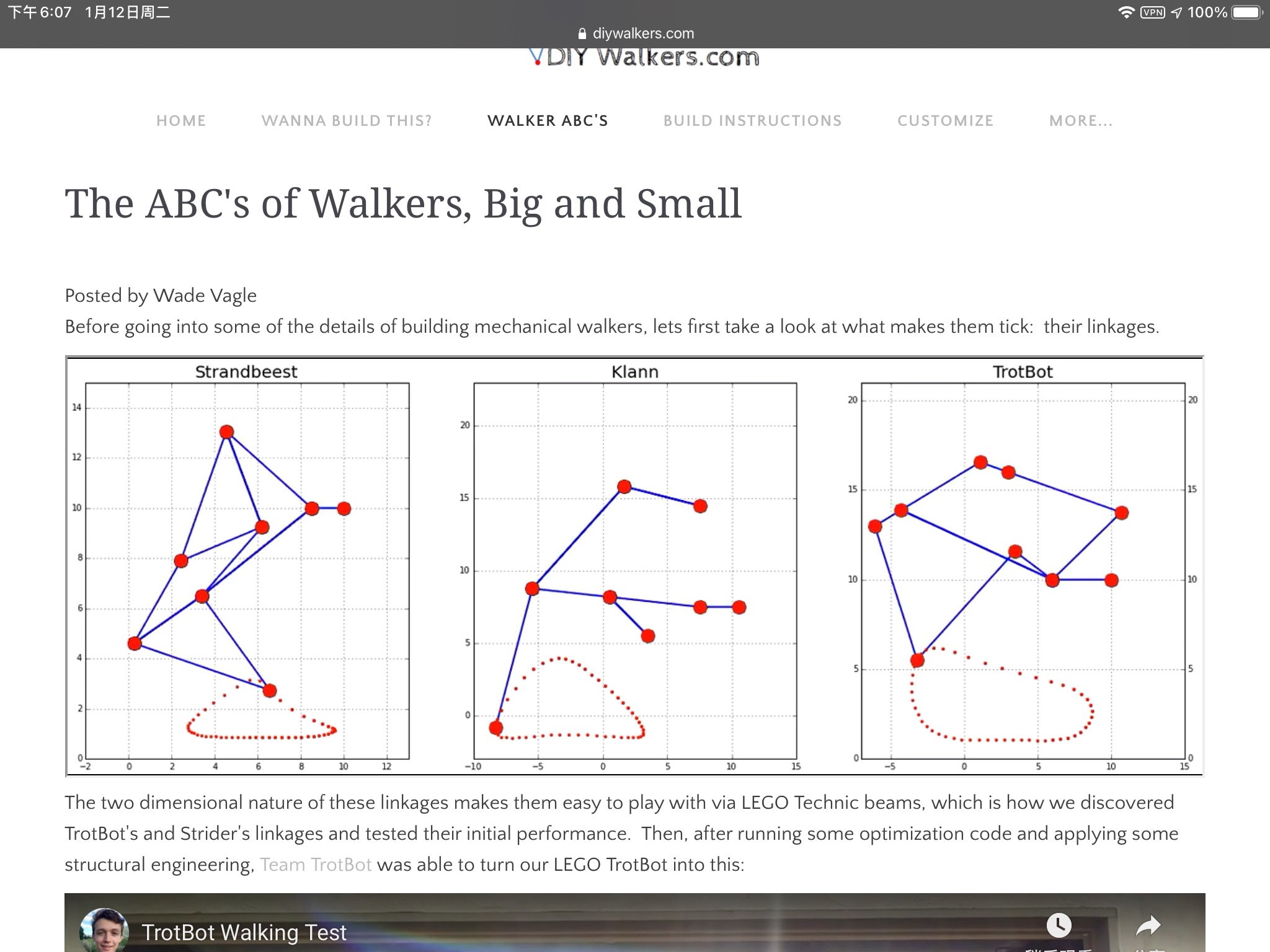
不同的机构 足迹是不一样的
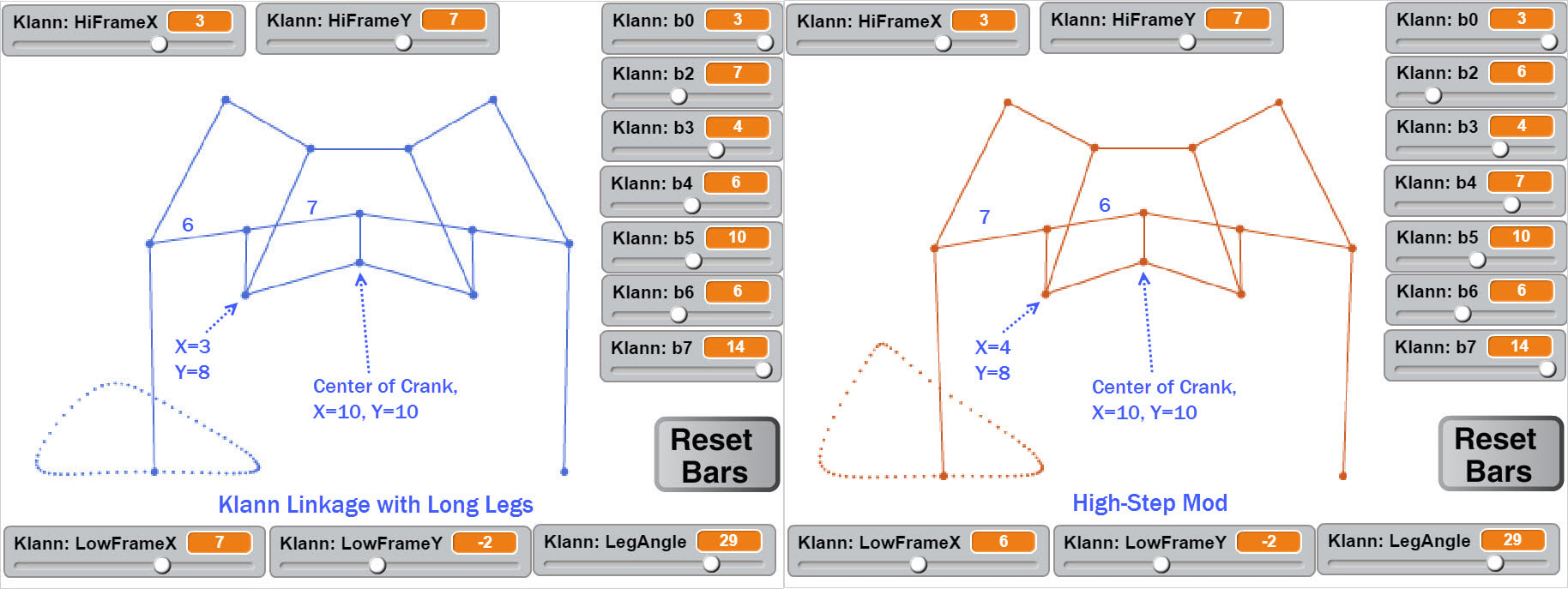
相同的机构 更换了比例后 足迹也是不一样的
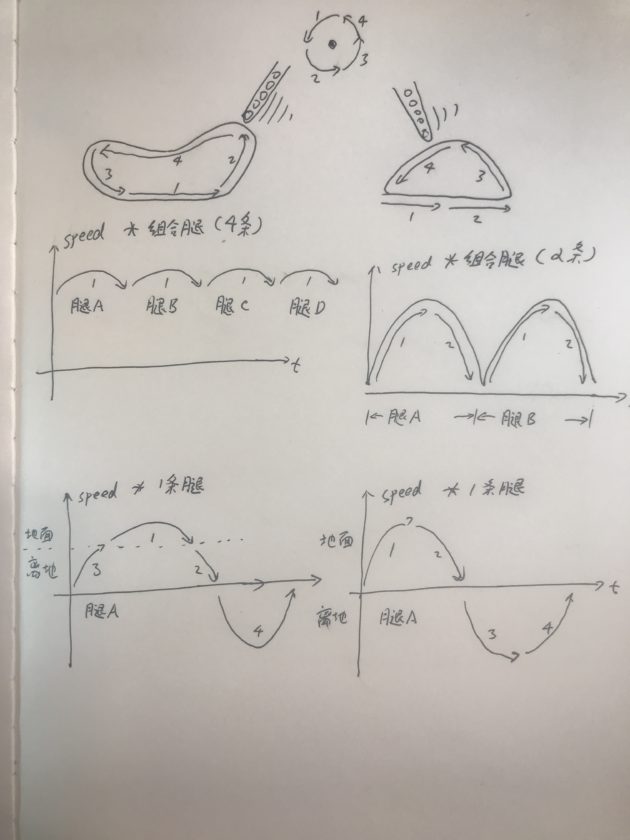
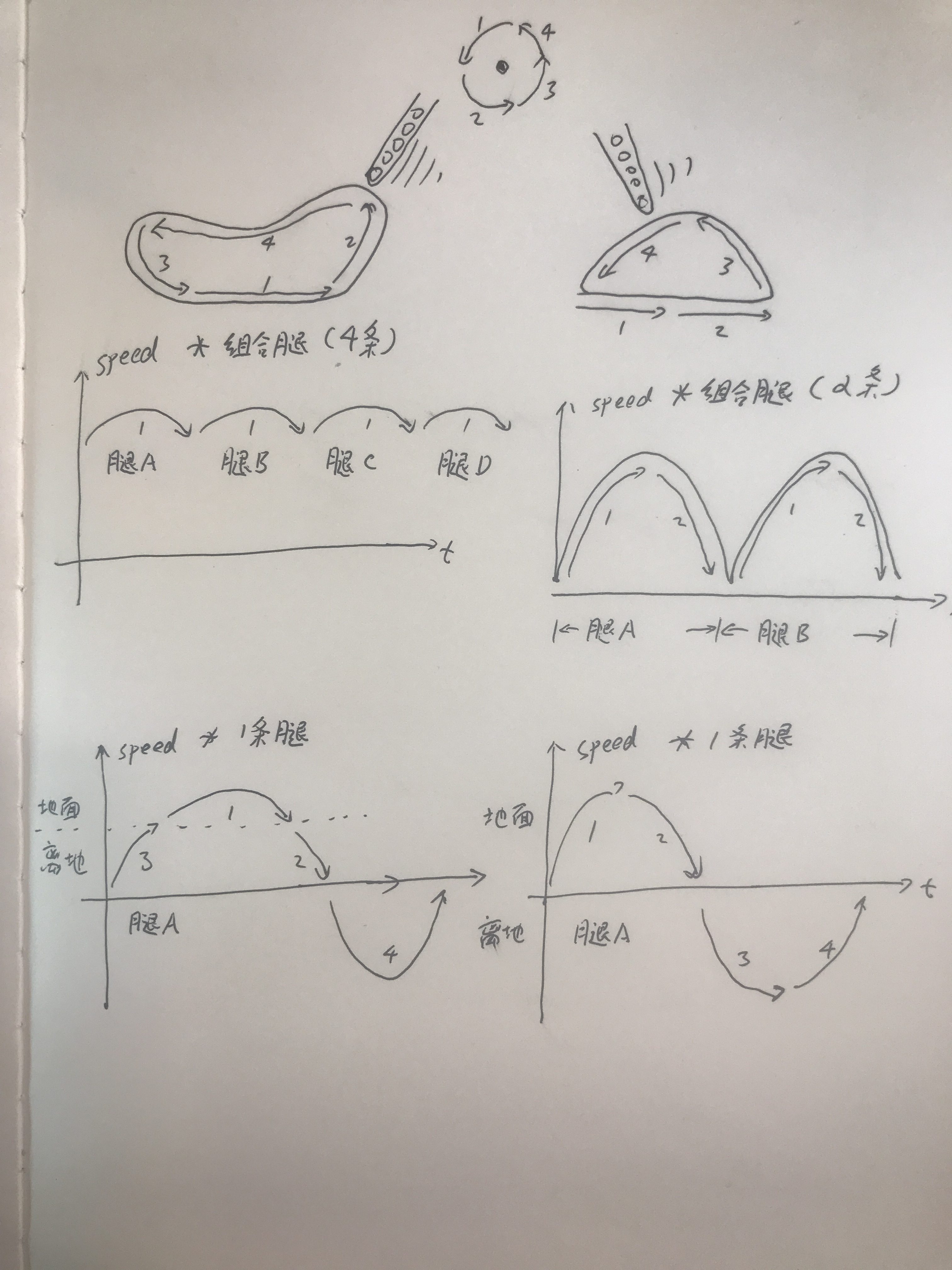
我选择了2款来分析:
汇报出这款 步行机器人:
请看视频:
大家都在做机甲 好漂亮 可惜我不会呀。 :( 哭
我只会做丑陋的机器人。
研究了一下连杆的步行机构有很多原理哦:高级的不得了:
不同的机构 足迹是不一样的
相同的机构 更换了比例后 足迹也是不一样的
我选择了2款来分析:
汇报出这款 步行机器人:
请看视频: