42099来了!

乐高机械组42099终于发售了,这套SET意义非凡,也是划时代的第一款乐高机械组产品,为什么说是划时代的第一款,因为它是首套搭载乐高全新机械组动力组件Powered Up(以下简称PU)的SET,这个全新的PU真是让广大乐高爱好者等了许久,什么时候乐高会出新的机械组动力组这个话题我记得和很多玩家讨论过至少有2-3年的时间,如今,它真的来了,我怀着激动且迫不及待的心情第一时间来为大家做个初步的上手体验!那我们就开始吧!

封绘的动态感十足,保持了乐高惯有的高水准,从封绘可以看出此次的SET是一个四轮越野车,有没有让你立刻就想起了9398?我觉得之所以选一个越野车作为PU登场的首个乐高SET一定有他们的用心,我认为首先单纯的遥控车体验能最直观的表现出PU组件的性能,遥控车辆易上手、趣味性高、接受度广泛,另外就是我提到的9398,如果没有记错的话9398当时所配备的Power Functions (以下简称PF)组件也是达到PF组件的巅峰,用了新的大型电机(L电机)、转向舵机、V2红外接收器,所以两款SET近乎相同的题材可能也有致敬、开创时代和二者比较的用意。

封绘和其他5个面介绍了SET的一些基本信息,值得关注的是PU的介绍和通过手机蓝牙控制SET的软件CONTROL+的信息,稍后我们为大家简单介绍一下。

先让我们愉快的开箱再开箱(因为有两个箱)!产品一共有:主零件袋3个、副零件袋3个、4个轮毂+4个胎皮、拼装手册+贴纸(这次的贴纸也是超赞,非常喜欢!)还有一盒最重要的PU组件(这就是我说的第二个箱)。

一共4样东西,每个都是从内到外的全新设计,分别是:超大电机*2、大型电机*1、蓝牙控制式智能集线器。
每个袋子上都做了方便打开的虚线处理,很轻松!

看到庐山真面目,新的PU和PF相比似乎除了颜色无论是形状、大小都截然不同,那我们就来比比,看看都有什么不同。
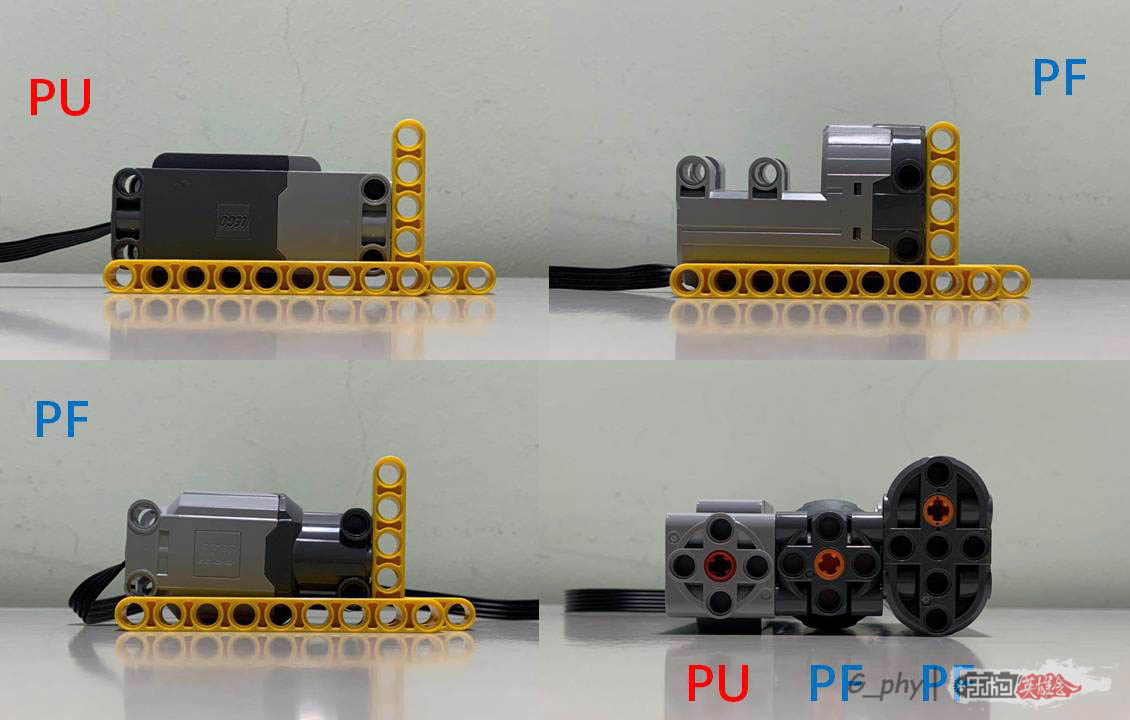
首先是新的PU大型电机,由于本次SET内它的作用是充当了转向舵机,所以我们对比的对象除了PF大型电机外也拿了PF舵机一同做比较。从图上看三者的尺寸为:
PU大型电机:8*5*3(长*宽*高/乐高单位)
PF 大型电机:7*5*3(长*宽*高/乐高单位)
PF 转向舵机:7*5*3(长*宽*高/乐高单位)
从简单数值上我们看到PU大型电机在长度上超出PF同类电机一个单位,我认为应该是在内部电机体积不变的情况下增加了用于控制速度和角度的元器件导致长度增加,这增加的一个单位长度多少会对少数对体积控制较为严格的MOC作品在创作时增加了一些麻烦,但是相比在电机控制中得到的提高我认为是利大于弊的,两个大型电机的孔位和孔数保持一致,在固定方面没有太大差异;再较PF舵机不规则的形状,在电机排布方面,PU大型电机应该也会更加优秀。(PS:图中两种大型电机高度显示为4个单位左右,但是上下多出来的半个单位鉴于在实际运用中的绝大多数情况下占用的是一个乐高单位的空间,所以被算为5个单位。)
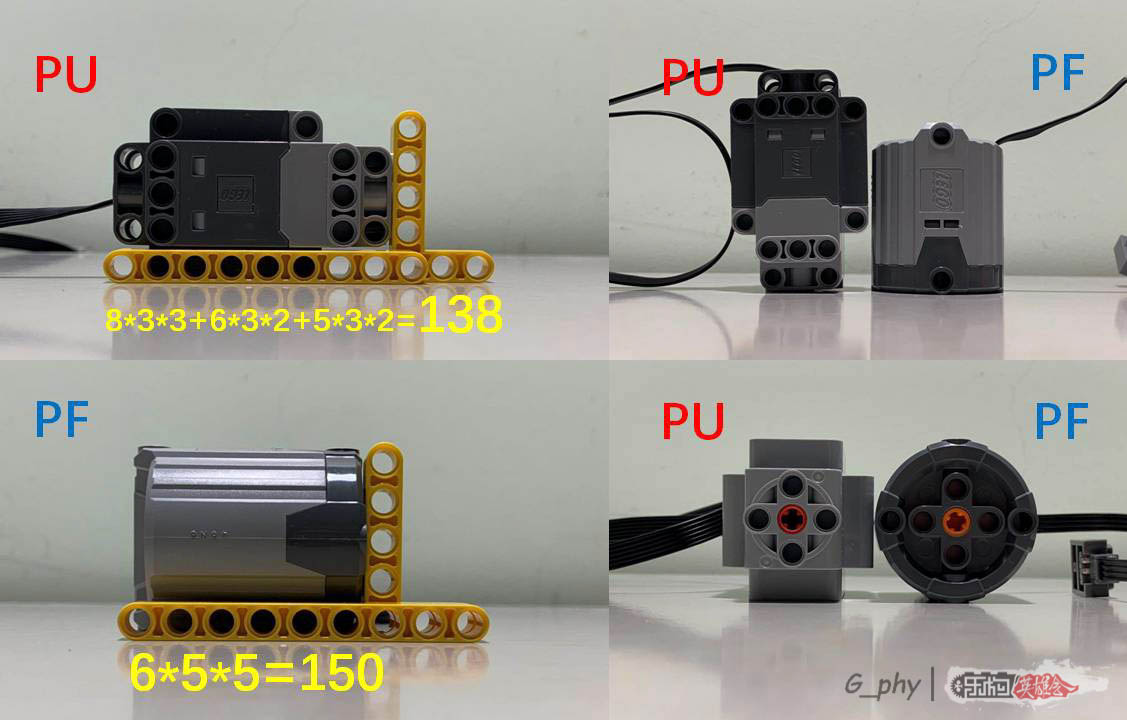
再来看看两个超大电机:
PU 超大电机:8*5*5(长*宽*高/乐高单位)
PF 超大电机:6*5*5(长*宽*高/乐高单位)
从简单的数据上我们看出新PU电机居然在长度上超出了2个乐高单位,但是因为这两个电机在外形上差别很大,于是我想再相对仔细的算一下到底哪个电机在实际运用中所占用的空间更大,于是结果如图上计算,想不到吧,PU的超大电机居然在空间占用上更有优势,另外值得一提的是规则的造型和数量更多的孔数,这不仅仅在电机的排布的方面得到了极大的改善,甚至可以把它作为结构搭建中的加强部分,这可是PF超大电机所不具备的优势,如果非要在外形方面找一点不如PF超大电机的地方那可能就是在极少数的MOC创作时会把电机裸露在外,那么PF电机独特的造型可能会给MOC作品增色更多(大型电机方面也有相同的情况)。体积变小了,如果按照我们先前对大型电机内部构造的推论来看,超大电机在配备和大型电机相同的控制元器件的同时内部体积并没有变大还可能是缩小了,这就意味着电机的尺寸可能有所减小,那么有可能也会缩小功率,想想乐高在推出PF大型电机以后就很少再用到PF超大电机了,也有人说对于乐高积木而言PF超大电机的的功率还是有点过大了,不知道是出于什么方面考虑,新的PU超大电机功率没有PF超大电机功率大的可能性还是很高的,只能说有利有弊吧,对于喜欢MOC竞赛功能类车辆和制作带动力的大型MOC的玩家来说多少会感到一些失望,能压榨的动力空间越来越小了。
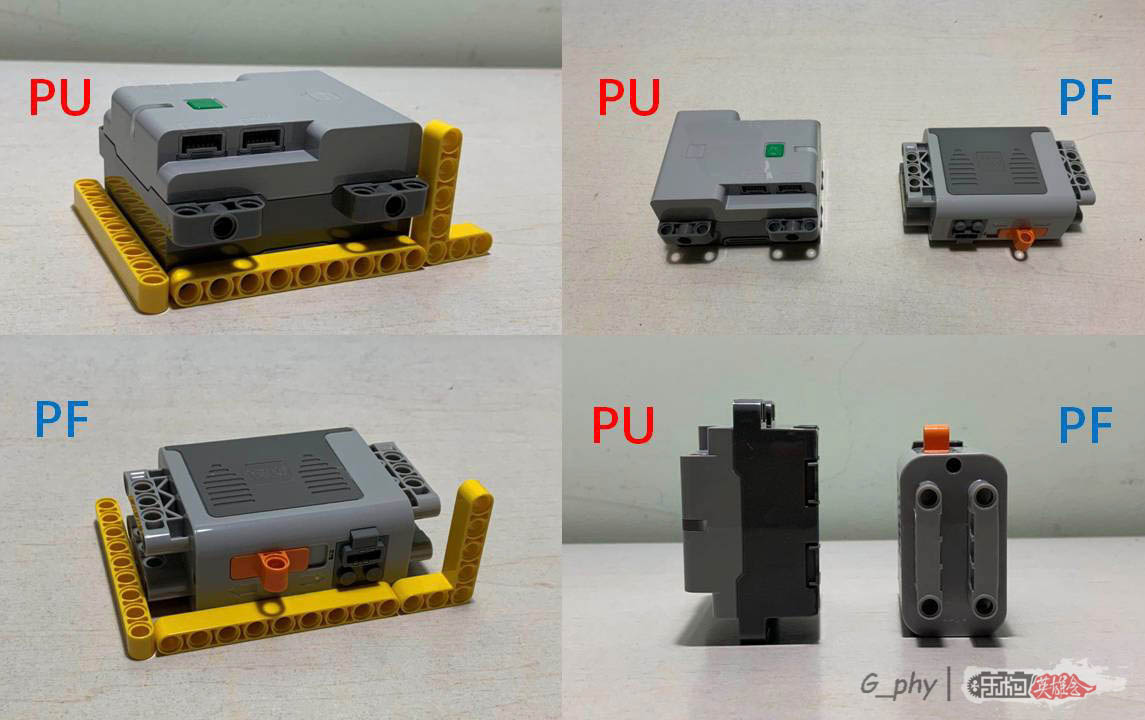
PU蓝牙控制式智能集线器:9*9*5(长*宽*高/乐高单位)
PF 5号电池盒:11*8*4(长*宽*高/乐高单位)
虽然把这两样东西放在一起作比较,但他们其实区别很大,一个是PF 5号电池盒,还有一个是新的PU蓝牙控制式智能集线器,后者除了与PF 5号电池盒具备相同的电池容量外(6节5号电池)还具备蓝牙接收器和智能控制功能以及传感器(如平衡传感器),也就是说单纯对比体积而言PF 5号电池盒较小巧,但是在需要配合1-2个红外接收器的情况下,还是FU蓝牙控制式智能集线器更具备体积上的优势。
PU PF
蓝牙接收: 红外接收:
- 遥控距离 较远 遥控距离 较近
- 遥控通道 不限 遥控通道 4
手机遥控: 手柄遥控:
- 便利 专用手柄
- 多媒体交互 红外遥控
其他: 其他:无
- 智能控制
- 传感器反馈
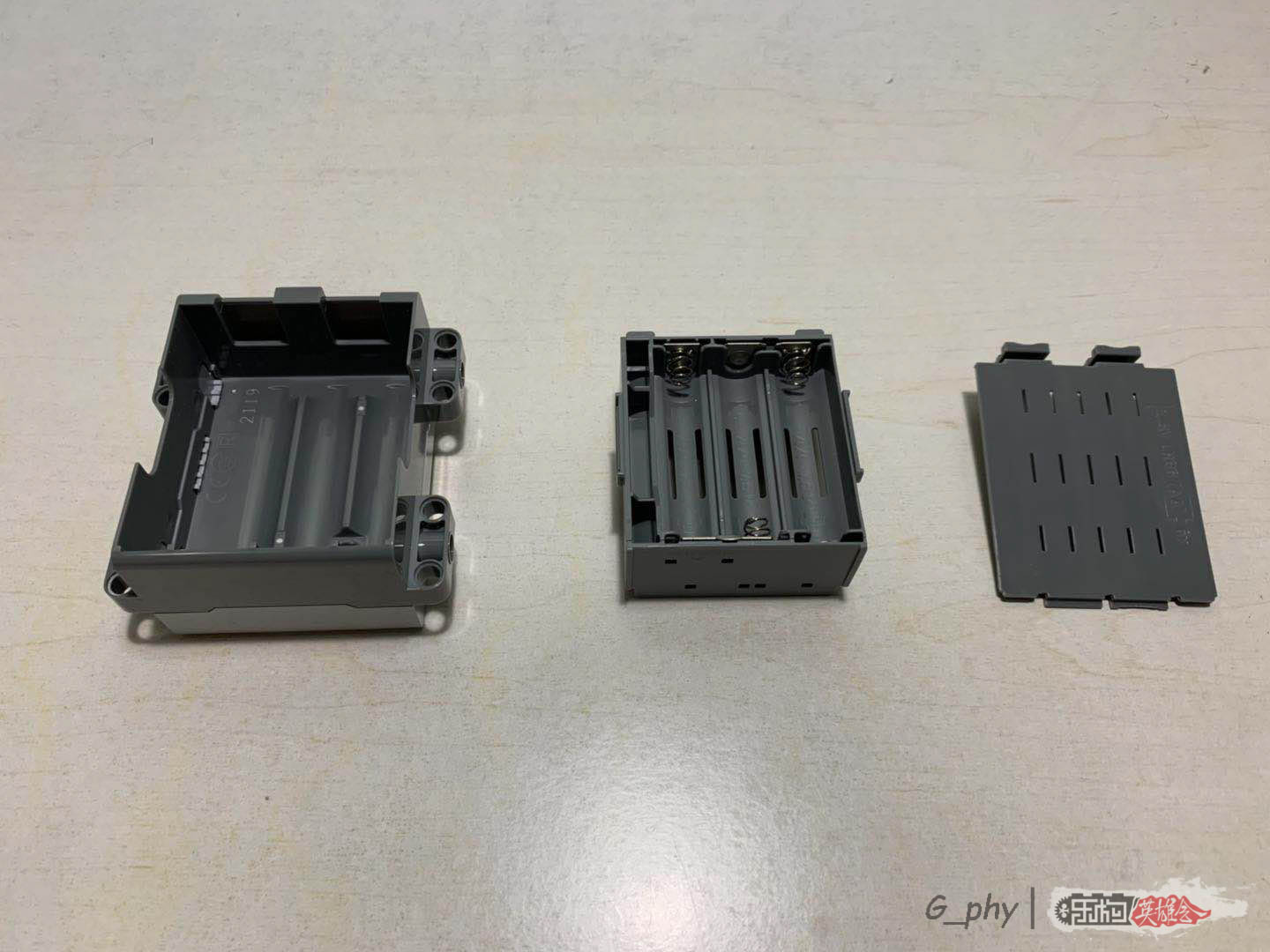
PU蓝牙控制式智能集线器内部有个电池槽,取出后正反装入6节5号电池。
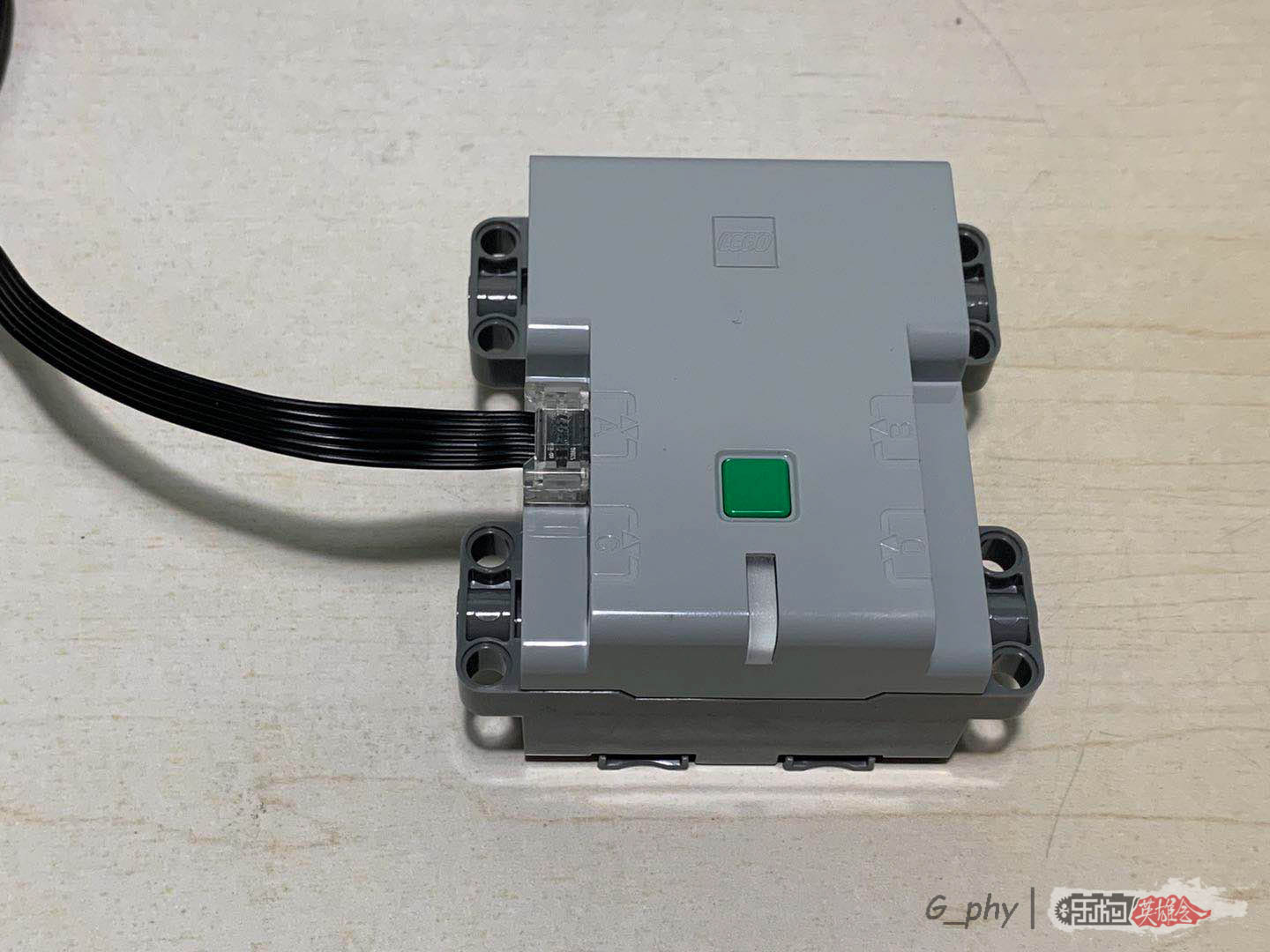
电机的水晶接口插入时,水晶接口的外露部分不会超出PU蓝牙控制式智能集线器的主体,做到了很好的体积控制,虽然是个小细节,但是很走心。
说完了全新的PU组件,接下来就是这套SET里另一个具有划时代的部分,独立悬挂零件组,这套零件组由三个独立的零件构成,两个传动轴零件和降速驱动桥。乐高之前也做过类似的独立悬挂零件,首次出现是在42029中,但是这套零件在实际运用中的局限性很大,主要是在连接后的可变角度很小,连接处容易脱出,脱出后角度变大,大小角度转换过程中会出现卡顿,所以在制作过程中要把悬挂上下的活动行程控制在很小的范围内,这样一来,这套老的独立悬挂零件的适用程度会变得很低,而这次由新零件组成的独立悬挂系统做了极大的改良,可以说从此乐高机械组终于可以做出真正意义上的独立悬挂车辆模型了,能把这套系统用在具有非凡意义的42099 SET上也能看出乐高对这套新零件的自信,除了传动轴个环节我还要着重说一下新的降速驱动桥,据我实测,降速比因该在5.25左右,我映像中这是乐高出的首款集成降速功能的驱动桥零件,好处是在得到同等降速比的基础上体积极其小型化,同时省去了多组拼装齿轮带来的能量损耗,但是缺点是降速比值是固定的,另外在这么小巧的体积内部做出的这么大降速比不知道内部精巧的齿轮组强度和耐久如何,这些只能在今后通过时间去验证了。
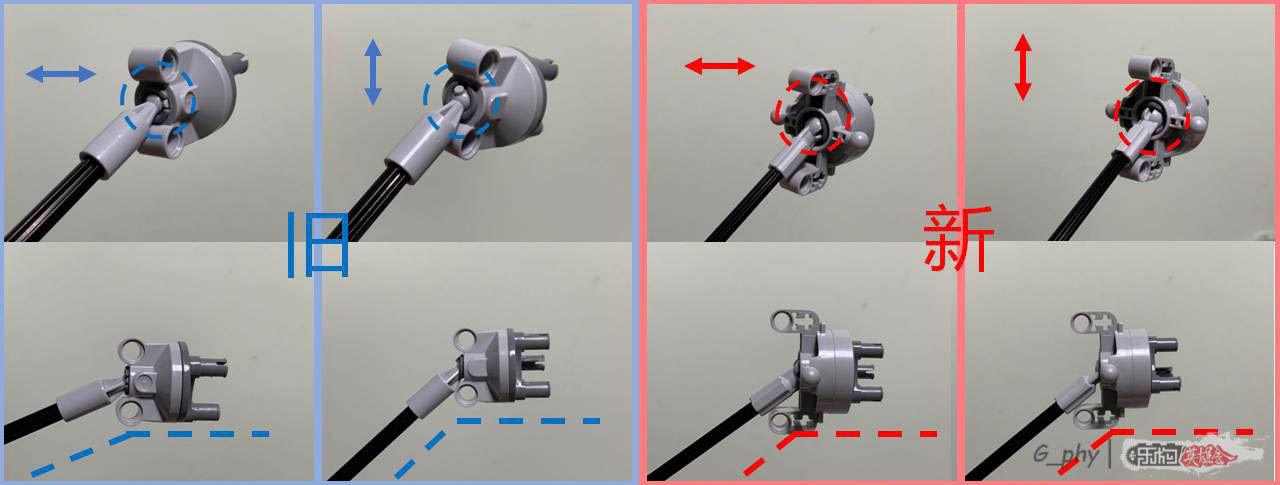
上图可以直观的看出之前的驱动轴和驱动桥之间连接变化造成的变相节角度差异,新的零件组合在旋转至任何方向时变相节角度几乎保持一致,且有效角度明显大于之前的驱动组件。

这幅图可以看出新的传动轴组合产生的最大变相节角度基本与摆臂零件能做出的最大角度保持一致,这样就能让独立悬挂系统实现最大的起伏行程,而之前的传动零件组合由于角度很小则完全做不到这点。
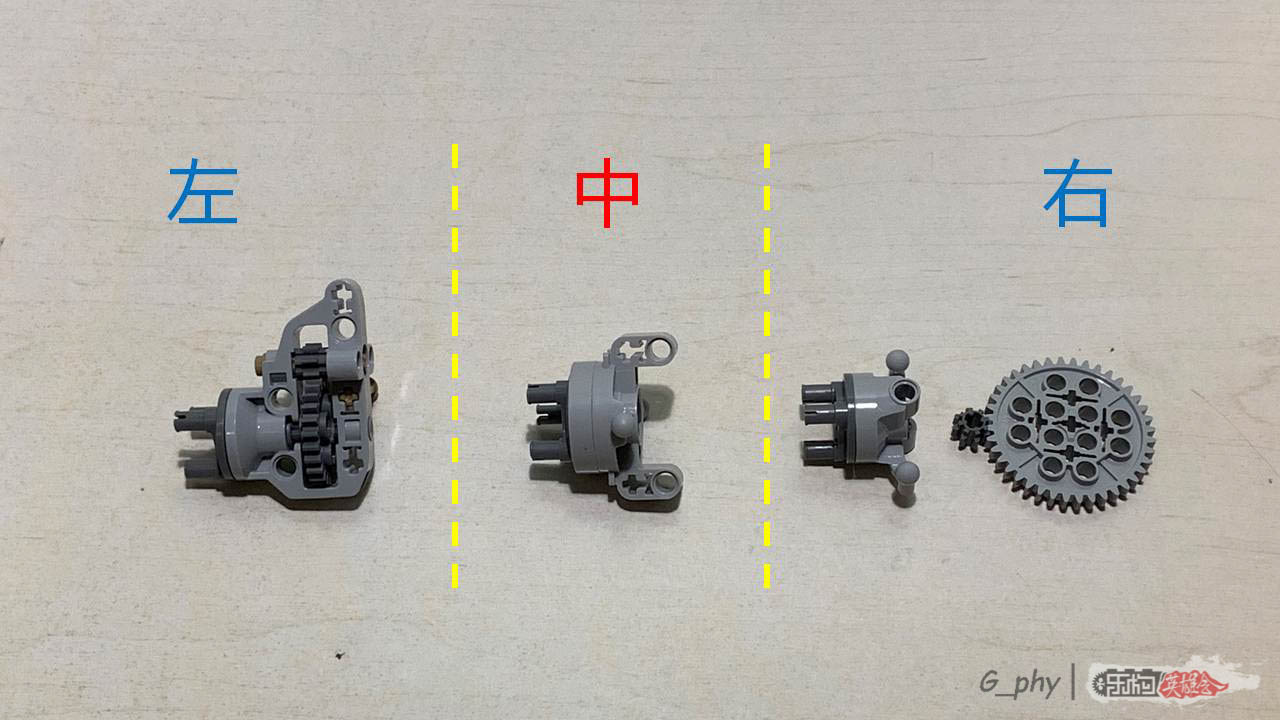
图中左侧是目前乐高主流的可以通过搭载齿轮实现调速的驱动桥零件,最大降速比为1:3,中间为新的降速驱动桥,最大降速比为1:5+;右侧为通过一级降速达到1:5索要用到的最基础的3个零件。新零件在体积上的优势一目了然。
研究了这么久终于要开始搭建了!

想要找零件快,就要先分类,磨刀不误砍柴工!

这次的橙黄色(中)是新颜色,有别于之前出过的橙色(左)和黄色(右)零件。

就喜欢这种“作弊”零件!
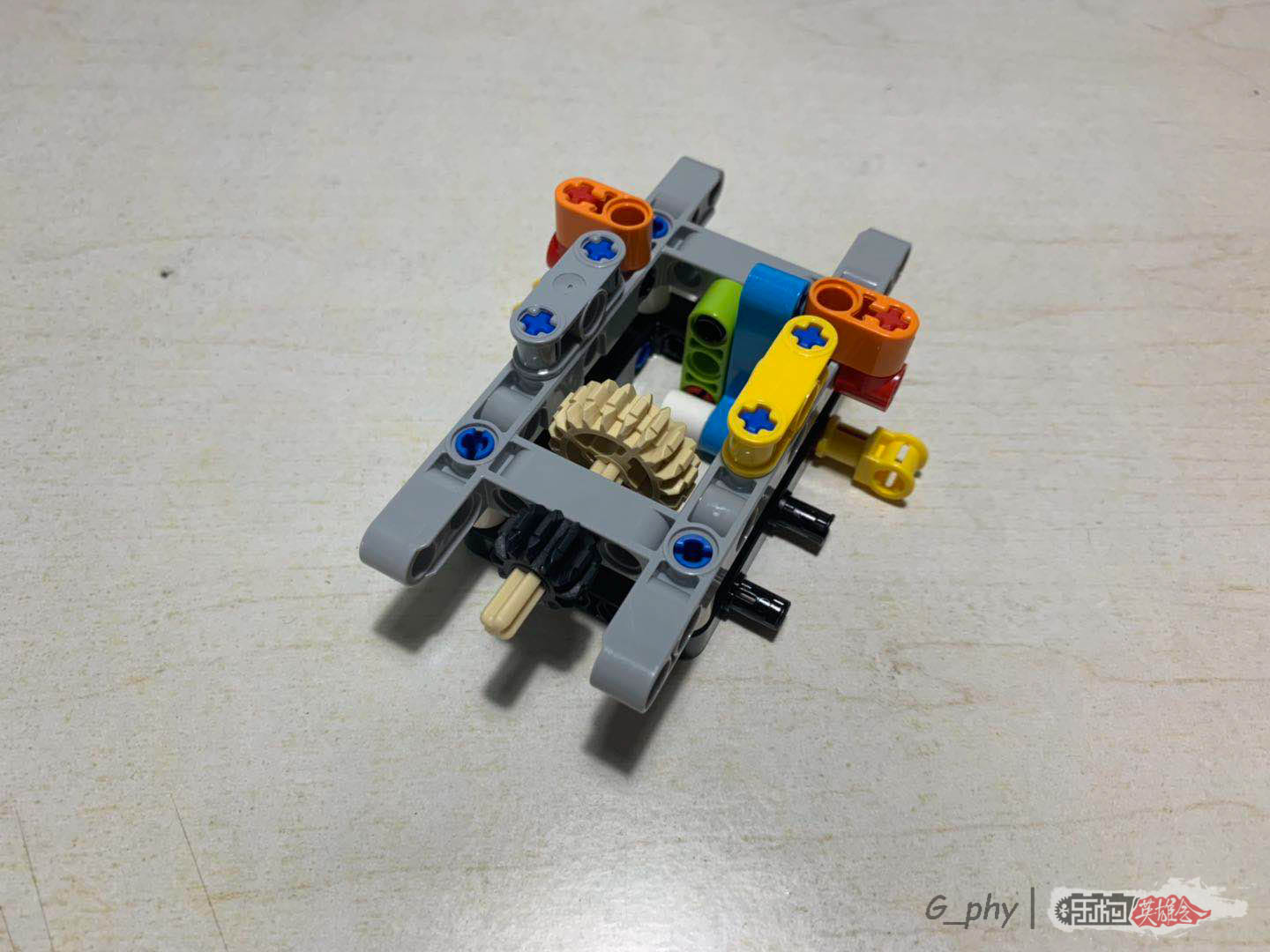
机械组系列越来越注重搭建提示零件色彩的运用,这么小一个组合里就出现了绿、蓝、黄、灰4个用来做标记的彩色零件,尽可能减少搭建过程中因为位置弄错而出现的拼搭错误,这小细节对于一款机械组SET的拼搭尤其是带动力系统的SET来说真的至关重要,我知道有很多新手和小朋友搭好以后结果动不了,往往自己也找不出原因,再结果就变成了不能动的摆设……
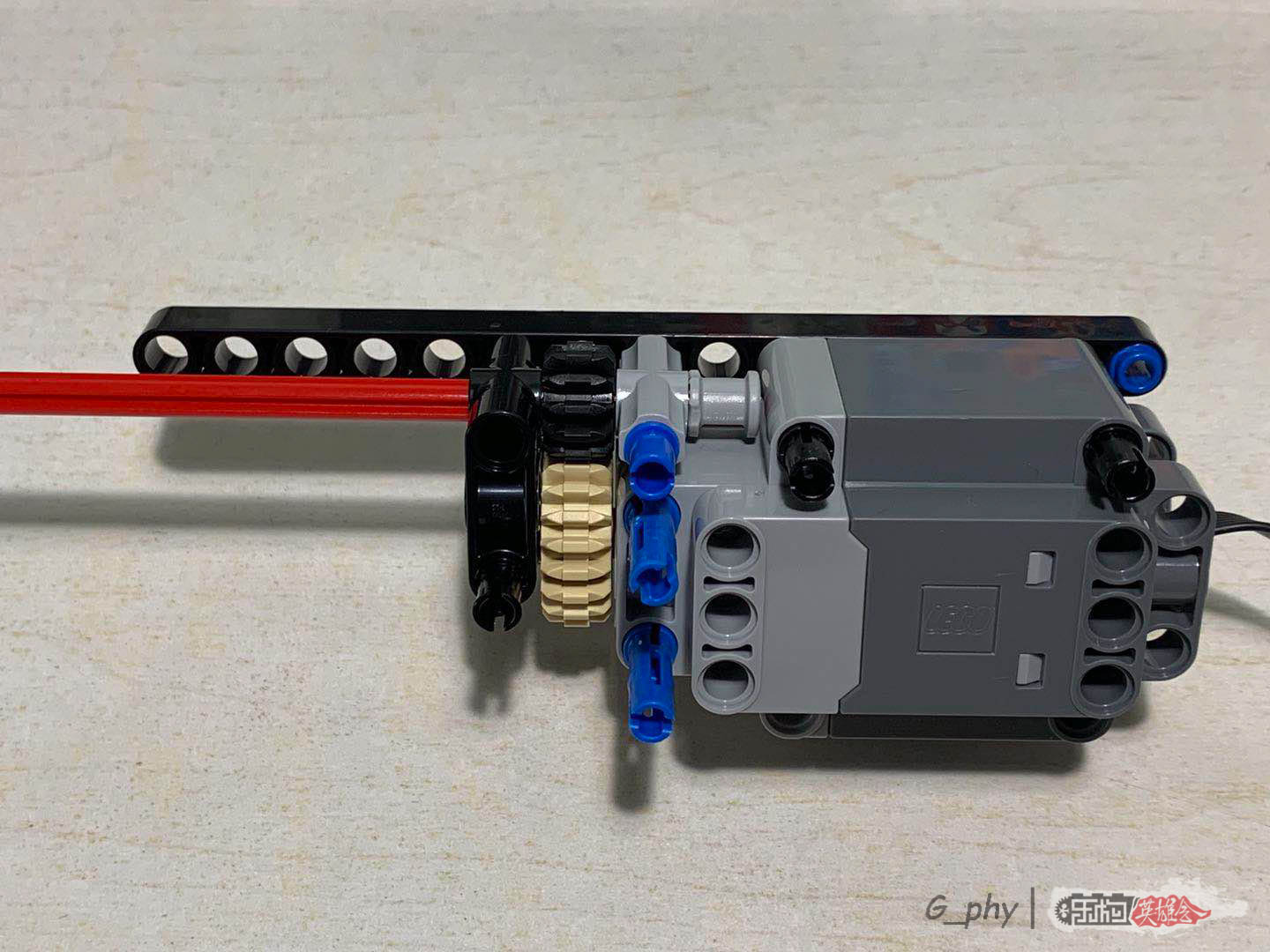
居然在动力输出的时候做了大带小的齿轮增速组合,这个很少见,一般都为了增大电机输出扭矩做一个小带大的降速组合,从这个侧面又一次感受到了之前提到过的新降速驱动桥降速比的强大……

新的排线整理零件,不同的颜色,可以有效的固定凌乱的电线,以后再不用在MOC作品里乱塞这些长出来的电线啦!也不用怕在PU蓝牙控制式智能集线器上插错插孔!

底盘完成!这是一个两段分体试的底盘结构,本身前后桥之间就具备了一定的扭幅,再加上4轮独立悬挂,这个通过性就很厉害了。
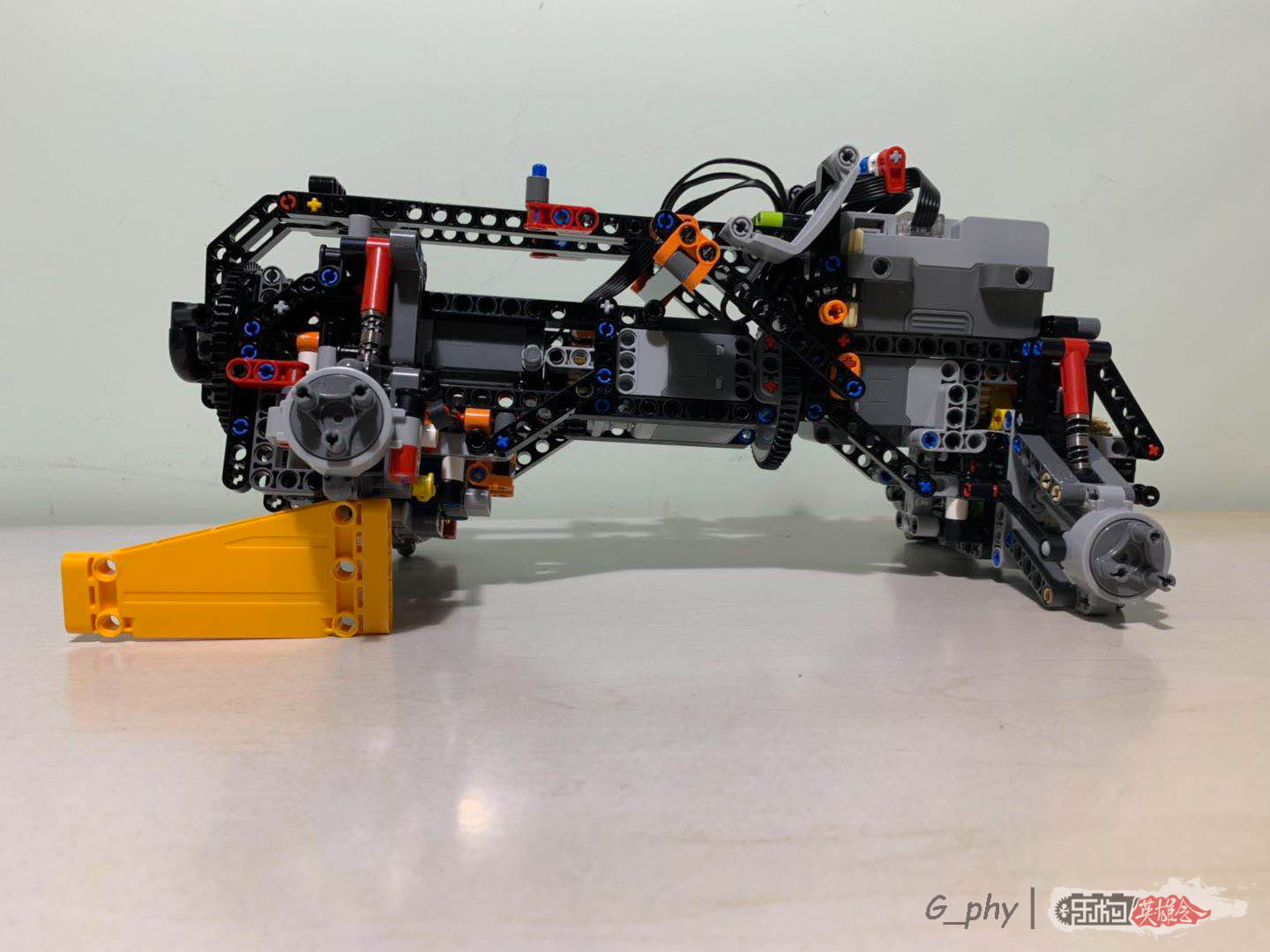
不借助悬挂的车身扭幅就有5个乐高单位左右。


外壳拼好了,不贴贴纸也挺漂亮,我是没有贴贴纸的习惯的,一来我觉得贴纸很珍贵,不舍得用,二来贴上去以后不方便我日后做其他MOC。

经过3个多小时的拼装终于完工了!

其他三轮着地的情况下,其中一只轮胎可以离地9个乐高单位左右。
试车试车!
 先用手机扫描说明书右下角的二维码,下载app。
先用手机扫描说明书右下角的二维码,下载app。

在下载中心的软件介绍中能大体对软件的情况有个了解。
菜单中有很多种语言可以选择。
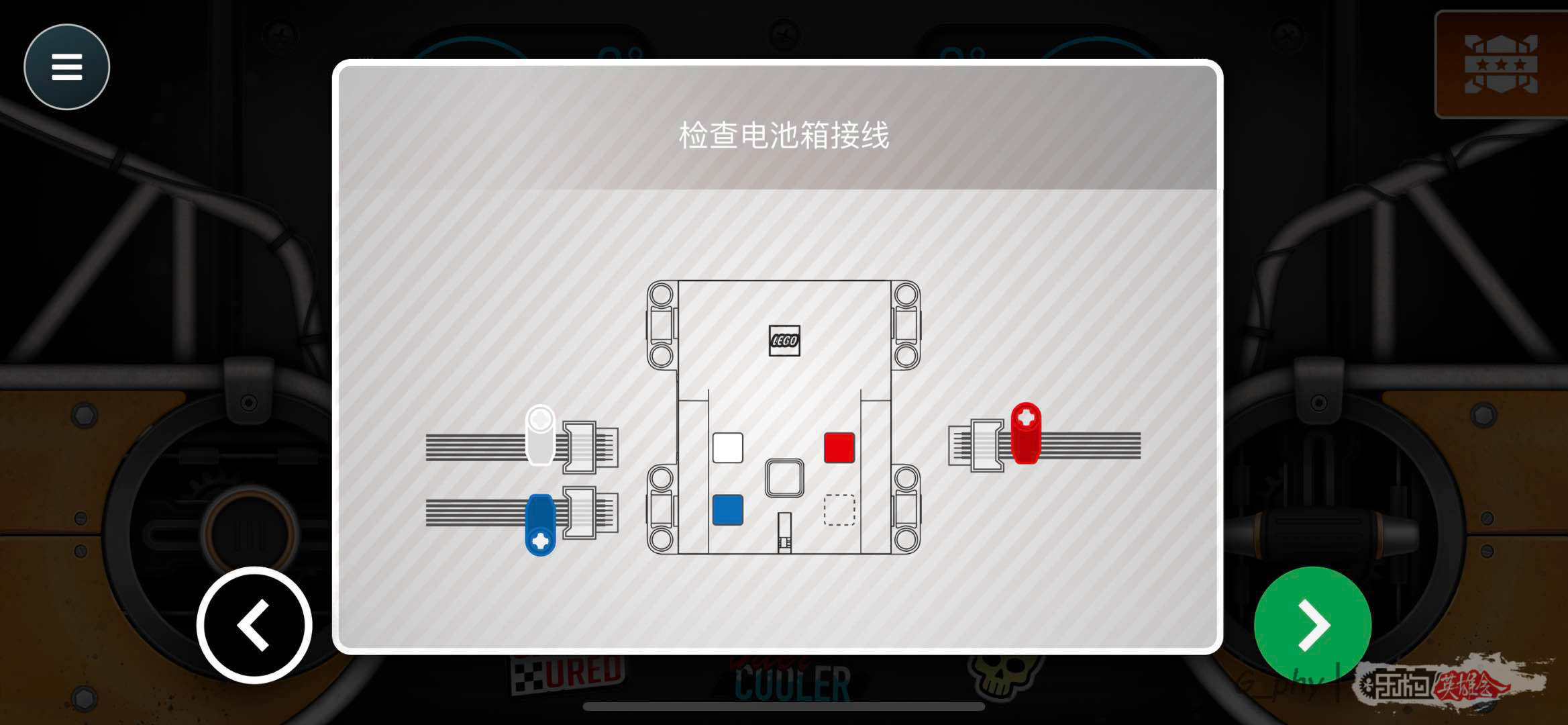
开始和PU蓝牙控制式智能集线器建立连接,再次提醒你接线是否正确。
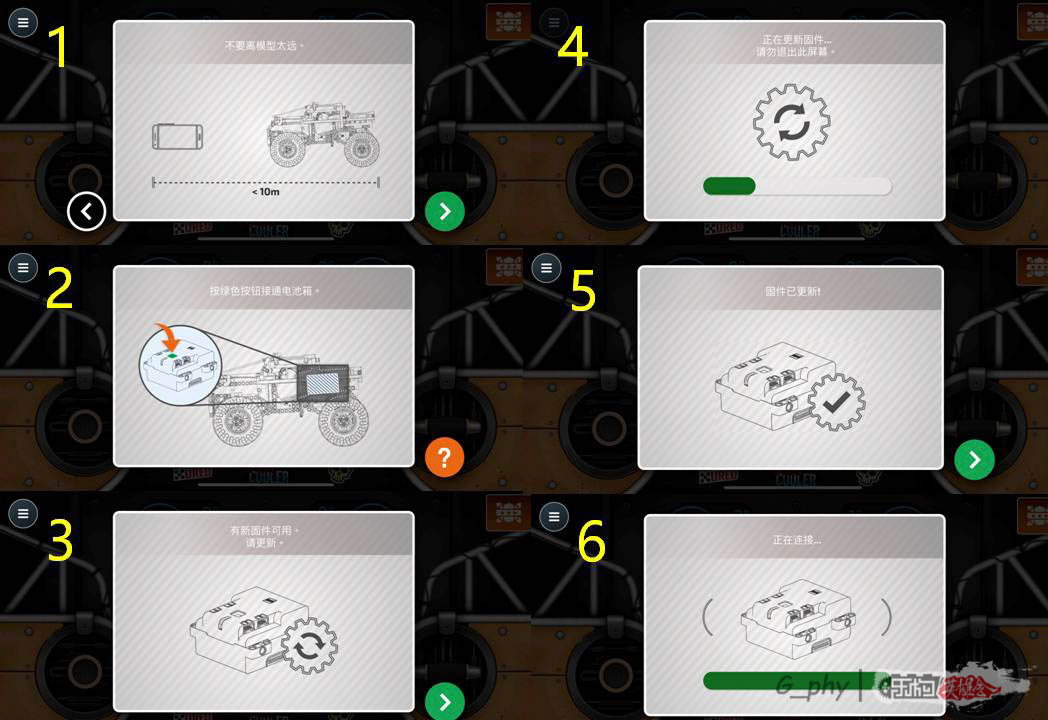
逐步继续即可,根据提示2长按打开电源,连接期间PU蓝牙控制式智能集线器指示灯由红、绿、蓝交替闪烁。

连接成功后指示灯变为蓝色,如要关闭也是长按,长时间按不操作也会自动关闭。
经过少时等待终于进入了操作界面。
 我们可以看到操作界面上的一些内容:
我们可以看到操作界面上的一些内容:
- 菜单
- 挑战模式
- 前后倾斜数值
- 左右倾斜数值
- 模拟仪表盘
- 方向控制(根据操作幅度可调整车辆转向角度)
- 前进、后退控制(根据操作幅度可调整车辆速度)

当车辆发生不同程度倾斜时,倾斜数据会有相应的读数显示,当倾斜角度大于30°时将变为红色的警示标志。

点击挑战模式,会进入从易到难的挑战关卡。
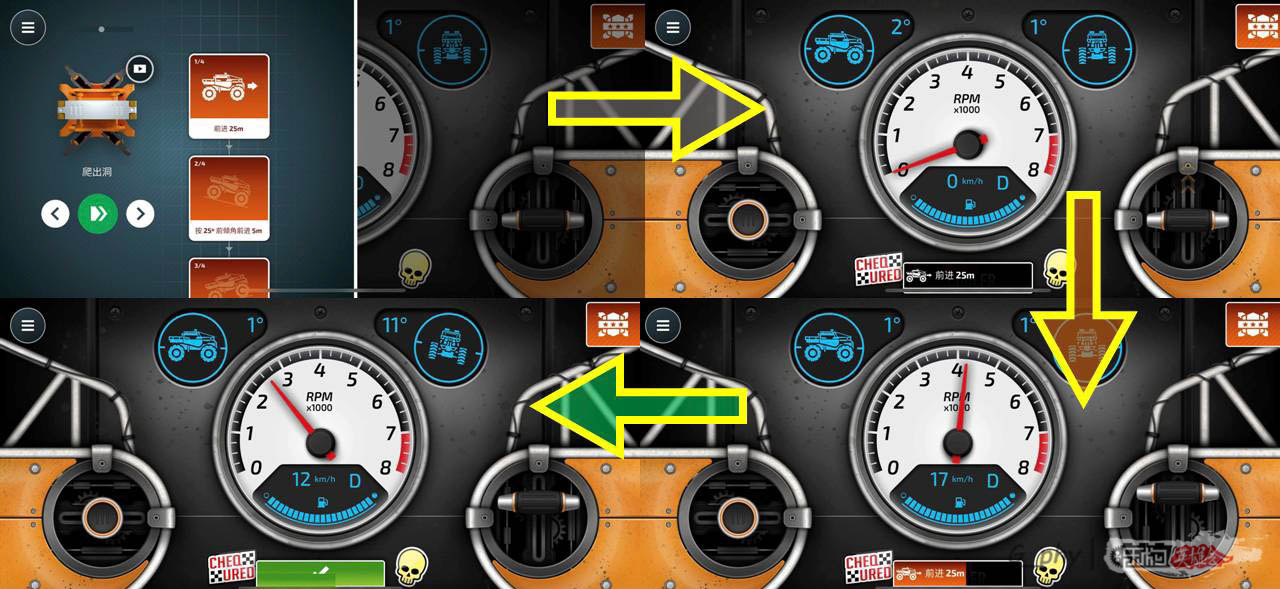
选择要挑战的项目进入以后,控制面板下方会出现任务完成的进度条,进度条变绿则完成挑战。
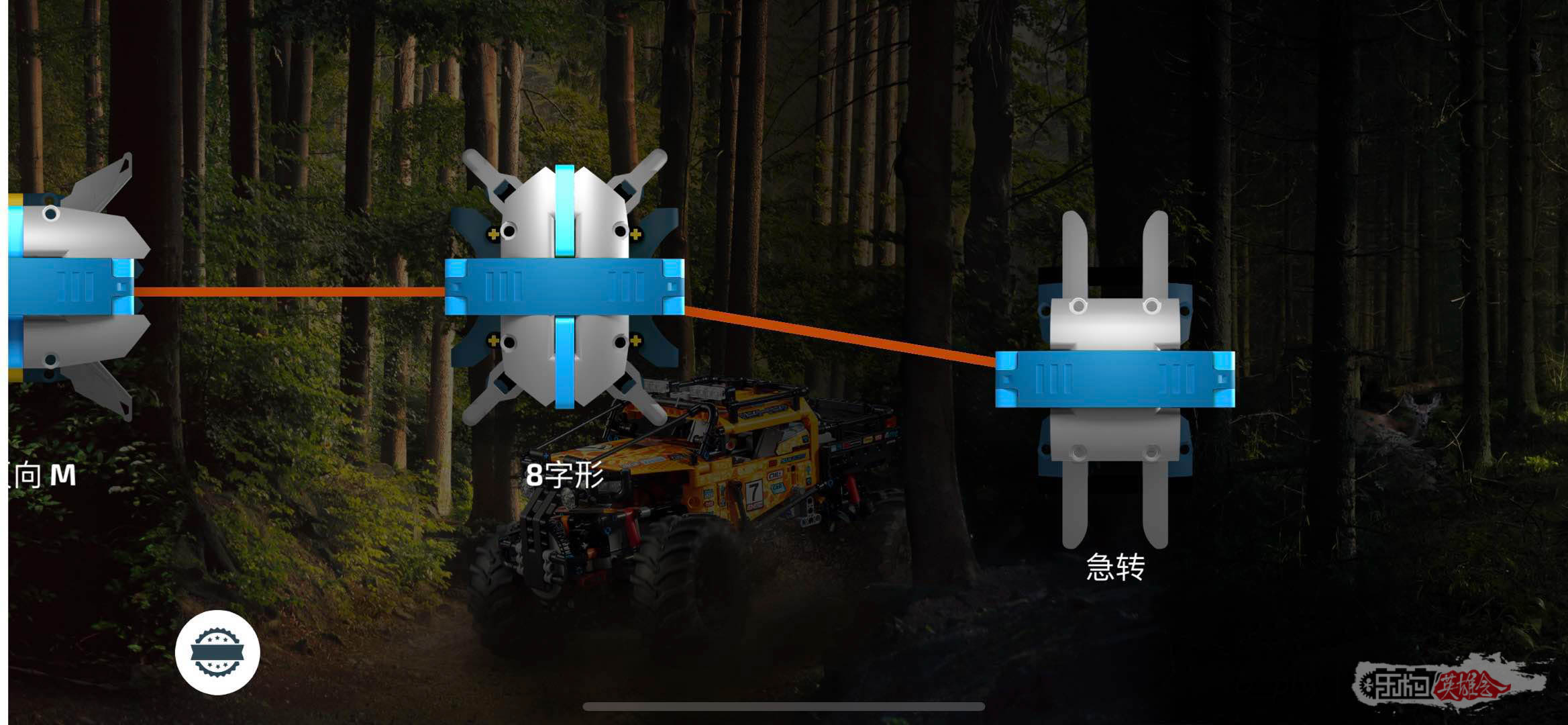
每完成一个挑战关卡,积木构成的图案会从灰色变成彩色,我觉得像是得到勋章或者奖杯的意思,有很多关卡,慢慢来!

挑战模式中还可以观看精彩的示范视频,体验很不错


快速用手指滑过控制界面会出现一个单触式控制模式,简单的说就是“傻瓜模式”,一开始先确认你习惯的车头方向,然后只需要点击或者滑动屏幕,车辆能做出相应的行进,很直观,上手也变得很容易,这个功能很赞,要知道不是每个人都会使用遥控器来指挥车辆(偷偷嘲笑一下)~
好了,就说到这里吧,我要出门越野了,你来吗?